所需手动操纵单轴运动的教学课-上海怡健医学
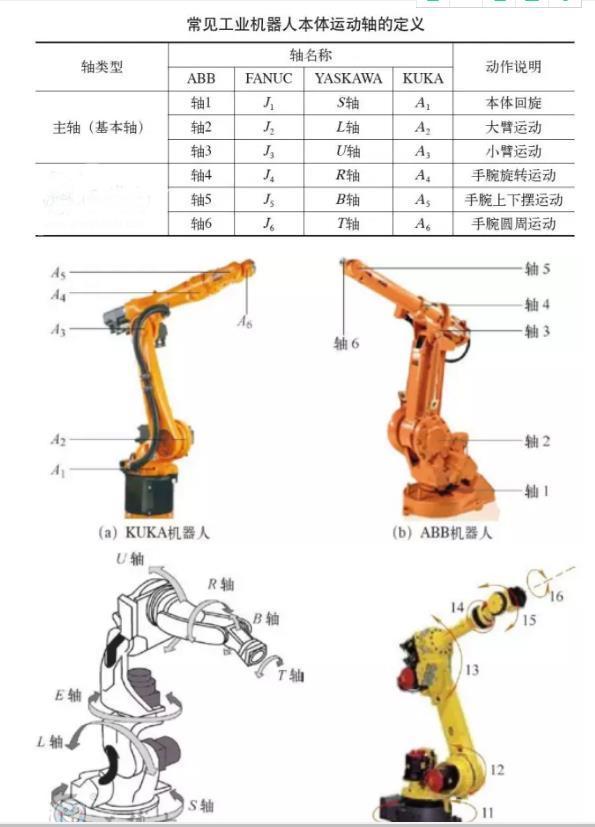
第一课教案授课日期:课时计划:8h 教学方式:综合教学课题:项目三 工业机器人的手动操作任务 三种手动操作模式 教学目的:1.单轴运动的手控2.直线运动手动操控3.Repositioning运动手动操控4.快捷按钮和菜单手动操控;教学重点和难点: 重点:掌握工业机器人单轴运动、直线运动、重定位运动的手动操作;难点:训练学生合理使用各种手工操作。所需设备或教具:1.多媒体教室2.机器人实践实训室摘要:一、review问题具体内容1.ABB机器人搭建系统分为几个步骤; 2.如何导入工件平台; 二、Project 导入演示手臂运动。 三、新课讲解单轴运动的手动操作。一般一个ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴(图2-9),那么每次手动操纵一个关节轴的运动,称为单轴运动。下面是手动操纵单轴运动的方法。(1)将控制柜上的机器人状态键切换到中间的手动限速状态。(2)在状态栏中,确认机器人的状态)机器人切换到“手动”。(3)点击“ABB”按钮。(4)选择“手动操作”。(5)点击“动作模式”。(6)选择“轴1-3”,然后点击“确定”。

选择“Axis 4-6”,可以操作轴4~6.(7)左手按下启用按钮进入“电机开启”状态。(8)在状态栏中,确认“Motor on”状态。(9)9 显示“Axis 1-3”的摇杆方向。黄色箭头代表正方向。使用摇杆的提示:您可以将机器人的摇杆与汽车的油门,操纵范围与机器人的运动速度有关,操纵范围越小,机器人的运动速度越慢。操纵范围越大机器人教案模板,机器人的运动速度越快。所以在操作时,尽量用少量的操纵让机器人变慢 运动,开始我们的手动摇杆学习。 . 下面是手动操纵直线运动的方法. (1)选择“手动操作”。(2)点击“动作模式”。(3)选择“线性”并点击“确定”。(4)点击“工具坐标”。对于线性运动,指定“刀具坐标”中对应的刀具。(5)选择对应的刀具“刀具1”。刀具数据的建立请参考本书内容4.4.1。(6)按用左手启用按钮进入“Motor On”状态。(7)在状态栏中,确认“Motor On”状态。(8)显示X,Y,Z轴的操纵杆方向。

黄色箭头代表正方向。 (9)操作示教器上的摇杆,工具的TCP点会在空间中线性移动。增量模式的使用:1.选择“增量”。如果使用摇杆通过位移幅度 如果对运动速度不熟练,可以使用“增量”模式来控制机器人的运动,增量模式下,摇杆每移动一次,机器人就移动一步。如果摇杆持续一秒或几秒,机器人将连续移动(以10步/秒的速度)。2.根据需要选择增量移动距离,然后单击“确定”。手动操纵机器人重定位运动是指机器人第六轴法兰盘上工具TCP点在空间中绕坐标轴旋转的运动也可以理解为机器人围绕工具TCP点调整姿态的运动,以下是手动的方法操纵重新定位 移动。 (1)选择“手动操作”。(2)点击“动作模式”。(3)选择“重定位”,然后点击“确定”。)(4)点击“坐标系”。(5)选择“工具”,然后单击“确定”。(6) 单击“工件坐标”。(7) 选择正在使用的“工具1”,然后单击“确定”(8) 用左手按下启用按钮)手进入“Motor on”状态。(9)在状态栏中,确认“Motor on”状态。(10)显示X,Y机器人教案模板,Z轴的操纵杆方向。

黄色箭头代表正方向。 (11)操作示教器上的摇杆,机器人绕工具TCP点移动进行姿态调整。手动操作快捷键(1)A机器人/外轴切换。(2)B线性运动/重定位运动切换。(3)C关节运动轴1-3/轴4-6切换。(4)D增量开/关。(5)A选择当前使用的刀具数据。(6) B 选择当前使用的工件坐标。(7)C 摇杆速度。(8)D 增量开/关。(9)E 碰撞监控开/关。(10)F 坐标系选择。(11)G动作模式选择四、现场练习项目名称:ABB机器人手动操作练习目的:掌握ABB机器人系统建立的正确使用方法操作步骤:分组培训,参观指导学生操作:按要求评价单轴运动、直线运动、复位运动的手动操作过程:评分标准组序号的正确性r(60%)团队合作(20%)安全意识(10%)6S意识(10%)总分五、总缧总结1.单轴手动操控2.直线运动手动操控3.重定位运动的手动操作六、工作置1.在RobotStudio软件中进行三种手动操作并录制视频。

-

-
席琳迪翁
这人照片拍的不好应该蛆晒干了
加油