Xiongchao99的博客

bpp 为 1,4,8 (注意和bpp = 8的灰度图像是有区别的)的彩色索引图像需要图像提供调色板(我在绘制时,把彩色索引图像升级成了 24 bpp 的像素数据块)。psychtooboxlihan chen2015.4.28matlab 图像刺激图像处理图像基础图像的变换与操纵计算生成图像图像基础像素、颜色、索引图像图像基础——像素数字图像离散的坐标:像素离散的强度:0~255 (黑~白)图像基础——颜色rgb颜色系统每个像素的红、绿、蓝均由uint8表示 (0~255)alpha通道:透明度24位/32位真彩色imtool(' photo.jpg')。数据预处理标准流程自然灰度图像 (1)灰度图像具有平稳特性,对每个数据样本分别做均值消减(即减去直流分量)——每个图像块,计算平均像素值,并将图像每个像素点减去均值。
(2)灰度图像(gray image)是每个像素只有一个采样颜色的图像,这类图像通常显示为从最暗黑色到最亮的白色的灰度。灰度图像与黑白图像不同,在计算机图像领域中黑白图像只有黑色与白色两种颜色;用于显示的灰度图像通常用每个采样像素8位的非线性尺度来保存,这样可以有256级灰度(如果用16位,则有65536级)。
图像中的每一个像素点都是一个颜色矩阵分量,然后我们让这两个矩阵相乘就能得到一个新的矩阵(新的颜色矩阵分量),这就是矩阵变换对图像中的每一个点的处理,使得对整个图像进行处理。光场相机记录四维图像再做积分生成二维图像,积分过程中就会有信息丢失(想象把平面点阵变成线点阵),自然二维图像像素数量减少了,后果就是空间分辨率不足。倒不是说传感器尺寸太小,而是同样的像素数量,传统相机记录二维图像,像素数能被完全使用,而光场相机记录四维图像再做积分生成二维图像,积分过程中就会有信息丢失,自然二维图像像素数量减少了,后果就是分辨率不足。
(4)索引图像是为了减少RGB真彩色存储容量而提出的,它的实际像素点和灰度图一样用二维数组存储,只不过灰度值的意义在于表示颜色表索引位置;而颜色表是指颜色索引矩阵MAP,MAP的大小由存放图像的矩阵元素值域决定,如矩阵元素值域为[0,255],则MAP矩阵的大小为256×3,MAP中每一行的三个元素分别指定该行对应颜色的红、绿、蓝单色值。
如某一像素的灰度值为64,则该像素的颜色值就是MAP中的第64行的RGB组合。也就是说,图像在屏幕上显示时,每一像素的颜色由存放在矩阵中该像素的灰度值作为索引通过检索颜色索引矩阵MAP得到。索引图像一般用于存放色彩要求比较简单的图像,如Windows中色彩构成比较简单的壁纸多采用索引图像存放,如果图像的色彩比较复杂,就要用到RGB真彩色图像。
如果人的声音高频限制在3000hz,那么高频分量我们看成sin(3000t),这个sin函数要通过抽样保存信息,可以看为:对于一个周期,波峰采样一次,波谷采样一次,也就是采样频率是最高频率分量的2倍(奈奎斯特抽样定理),我们就可以通过采样信号无损的表示原始的模拟连续信号。如果人的声音高频限制在3000hz,那么高频分量我们看成sin(3000t),这个sin函数要通过抽 样保存信息,可以看为: 对于一个周期,波峰采样一次,波谷采样一次,也就是采样频率是最高频率分量的2倍(奈奎斯特抽样定理),我们就可以通过采样信号无损的表示原始的模拟连续 信号。声音高频限制在3000hz,那么高频分量我们看成sin(3000t),这个sin函数要通过抽 样保存信息,可以看为: 对于一个周期,波峰采样一次,波谷采样一次,也就是采样频率是最高频率分量的2倍(奈奎斯特抽样定理),我们就可以通过采样信号无损的表示原始的模拟连续 信号。
fs>2*fmax;
至于奈奎斯特采样定理成立的原因,可见下图:

答:(1)图像增强主要分为空间域增强方法和频域增强方法。
空间域就是指图像本身,频域指图像经过傅里叶变换的信号;
(2)空间域图像增强操作很多:
与全局阈值二值化不同,局部动态阂值二值化是根据局域像素点的灰度值 及其邻域像素点灰度值的分布情况,来设置相应的阈值。其中(i,j)表示像素位置,f(i,j)表示灰度化后的像素值,r(i,j)、g(i,j)、b(i,j)为灰度化前相应的rgb分量值。具有相同灰度级的像素点在变换 后仍然具有相同的灰度级。
直方图处理(直方图均衡化、直方图局部增强);
算数逻辑操作增强(图像减法处理、图像平均处理);
平滑滤波、线性滤波、统计排序滤波、均值滤波、中值滤波等滤波;
锐化处理(拉普拉斯算子锐化、梯度法锐化);
等等,都是空间域图像增强方法。
答:灰度直方图是横坐标为灰度级、纵坐标为像素个数的直方图,用于表示每个灰度范围内的像素个数;
归一化灰度直方图:将灰度直方图的纵坐标值除以像素总数,产生的新直方图即是。
答:(1)直方图均衡化:就是通过变换函数,使得图像的灰度分布较为均匀,将灰度值集中的部分均匀分散到整个灰度范围,使得直方图的各个灰度级y轴较为平坦。从而实现图像增强,如较暗的图片变得较为明亮,过亮的图片变的正常,从而利于观察识别。
(2)均衡化的变换函数:就是一个映射函数,必须满足两个条件:1)一个单值单增函数;2)映射后灰度范围不变。实际中常用累积分布函数。累积分布函数如下定义:
①先求当前灰度级的累计概率(即当前灰度级以及小于当前灰度级的像素个数和在图像中的比例):
Sk是当前像素值的累计概率,k是当前像素的像素值,n是图像中像素个数的总和,nj是当像素值等于j的像素个数,L是图像中可能的灰度级总数。
②求当前像素的映射像素值:
映射函数g=最大灰度值*Sk;(例如最大灰度值为255,则g=255*Sk)
(3)缺点:
1)变换后图像的灰度级减少,某些细节消失;
2)某些图像,如直方图有高峰,经处理后对比度不自然的过分增强。
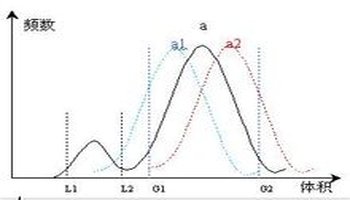
(4)应用:改善光线对图像处理的影响。成像中由于光照过大或过小,会造成图像结果偏暗或偏亮或者光线不均匀,这样图像直方图就会表现:灰度的两个高峰分别向某一边滑动,同时灰度值都较为集中,不能真实反应目标图像的特征。所以使用直方图均衡化可以减少这种影响。
(5)直方图均衡化步骤:
①找到一个映射函数,定义为g = EQ (f)。f完整表示是f(x,y),代表图像中某个位置的像素值;
②依次使用EQ将图像中每个位置的像素值映射为新的像素值。
u直方图匹配:把原图象的直方图变换为某种指定形状的直方图或某一参考图象的直方图,然后按照已知的指定形态的直方图调整原图象各象元的灰级,最后得到一个直方图匹配的图象。u 直方图均衡化:原图像通过某种变换,得到一幅灰度直方图分布均匀的新图像。 codebook (12)背景建模 opencv (11)直方图反向投影 opencv(10)图像变换之边缘检测 opencv(9)直方图均衡化,对比,匹配 opencv(8)直方图操作 opencv(7)图像金字塔 opencv(6)漫水填充。
图像的直方图规定化(匹配) 处理。有些时候,希望处理的图像具有指定的直方图形状:直方图规定化(匹配)保留原直方图的大体形状,在暗灰度值部分的像素分布,做平滑过渡处理。 2 基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 2 基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 虽然 ehm 算法能够快速、精确地进行直方图匹配,使原始图像具有与目标图像几乎完全一样的直方图,但是在景象匹配色彩恒常处理过程中,由于基准图和实时图之间不但具有色彩差异,还不可避免地存在着平移、尺度、旋转等差异,直接采用该方法将会严重影响色彩恒常处理的效果并限制景象匹配系统的定位精度。
梯度直方图特征(hog)是一种对图像局部重叠区域的密集型描述符,它通过计算局部区域的梯度方向直方图来构成特征。边界方向直方图法首先微分图像求得图像边缘,然后,做出关于边缘大小和方向的直方图,通常的方法是构造图像灰度梯度方向矩阵。边界方向直方图法首先微分图像求得图像边缘,然后,做出关于边缘大小和方向的直方图,通常的方法是构造图像灰度梯度方向矩阵 [37] 。
作用:可以实现对图像细节的增强。
答:主要包括与、或、加、减法操作。
图像相减法:应用最为成功的是医学领域的掩模式X射线成像术,另外图像相减法在图像分割中也有应用;
答:(1)掩模:在滤波器中常提到的k*k的矩阵(一般k为奇数),用于依次滑过每一像素点并在每点进行滤波计算,矩阵中的数据成为掩模系数。
imshow(windowed)邻居处理高斯模糊、边缘检测空间滤波定义一个矩阵(称为滤波器filter)将该矩阵覆盖在每个像素点上对所有被覆盖的点将原图像矩阵和该矩阵的对应点相乘求和变成新图像的点由邻居决定新的像素点的强度高斯模糊改变窗口大小,令x = y = 10, stdev = 5,生成一个“高斯窗口”让窗口矩阵的和等于1gafilter = gawindow/sum(sum(gawindow))。改进了基于方差的自适应图像采样器(vbas),以桶和逐行模式子像素滤波。该滤波方法首先使用极值法检测噪声图像中被椒盐噪声所污染的像素,然后使用自适应滤波方法修正噪声像素的灰度值,得到去除椒盐噪声的图像。
(2)邻域处理:上述线性滤波器就属于邻域处理滤波器,因为其将本像素点为中心的邻域像素都纳入计算中了;实际非线性滤波器也是邻域处理方式,如常见的非线性滤波器:中值滤波器。
(3)如何解决图像边缘掩模滤波问题:掩模移动都是以矩阵中心作为基准点的,那么对于图像边缘,掩模矩阵就会有一部分超出图像范围。一般解决方法有:
1)限制掩模移动范围,使得掩模始终在图像范围内。缺点是边缘部分像素得不到滤波处理;
2)使用灰度值0或者边缘灰度值扩充边缘,滤波后删除。缺点是影响靠近边缘像素的滤波结果;
3)掩模超出部分不参与滤波计算;
三种方式中1)是最佳选择。
答:常见的线性滤波器有:均值、加权均值滤波器等。
以掩模为3*3为例:
1/9*
1/16*
注:矩阵前面的系数都是掩码系数之和的倒数。
上述两个掩模构成的滤波器都可称为平滑线性滤波器,前者是最简单的均值滤波,后者是加权均值滤波。每个像素点的滤波结果就是掩模矩阵中心在该点时的掩模系数与下面相应像素灰度值的乘积求和。
其实对于不同掩模系数组合,掩模大小更能影响滤波结果。不同大小的掩模矩阵对于不同大小的噪声点会有不同的滤波效果。
答:统计排序滤波器属于非线性滤波器,最常见的是中值滤波器;例如在一个3*3的矩阵范围内统计像素值并排序,取中值作为矩阵中心像素的灰度值。
黑白图像(黑白图像的每个像素不是黑色就是白色,这种图像所占空间最少,。色彩视知"同时对比"现象也涉及明度,(有心理学家指出:把一块灰色依次先放在白色背景,再放在黑色背景上,便给人以不同色度错觉,放在白色显得暗,放在黑色显得亮,同样,放在黄色背景上红色显得暗,放在蓝色背景上红色就显得明亮些,温暖些,除了非常暗淡色彩外,一般色彩在暗背景上,总是显得极为强烈,,把一种色彩置干白色背景总能获得简洁效果,所有色彩在白色背景上都显得暗些,而淡色则由于黑背景而加强。黑白图像(黑白图像的每个像素不是黑色就是白色,这种图像所占空间最少且显示得最快。
滤波方式:滤除椒盐噪声比较有效的方法是对信号进行中值滤波处理。顾名思义,中值滤波是指将一个像素的值用该像素邻域中强度值的中间值来取代,至于领域范围取多大则视实际需要而定。去除椒盐噪声的后可以得到较为平滑的信号,其效果要优于均值滤波器,当然同样也会造成边缘模糊、信号不够锐利,这似乎也是很多滤波方法的一大通病。
调节器的基本调节规律有位式调节(其中以双位调节比较常用)、比例调节(p)、积分调节(i)、微分调节(d)及其组合,如比例积分(pi)、比例微分(pd)、比例积分微分(pid)。这个系统的的调节器功能多了,既有单独的比例、积分、微分调节器,又有组合了比例积分、比例微分、比例积分微分的调节器,可以不用过多考虑空间限制了。衰减曲线法整定参数的具体操作步骤与临界比例度法相同,但只需获得4:1衰减振荡过程曲线即可,记下此时的比例度,并在4:1曲线上求得振荡周期,然后根据下表给出的经验公式,求出相应的比例度、积分时间和微分时间。
美国军舰是在12海里