(1)标出金属球在静电平衡后左右两侧带电的符号. (2)由

第八部分 静电场
第一讲 基本知识介绍
1》欧姆定律:r=u/i 适用于纯阻性电路的计算,电动机绕组是以感抗形式负载于电源上的,所以不适用于欧姆定律的计算.2》加在电阻两端的电压不一定是电源直接提供的电压,可以通过电容降压(交流电时),也可以是通过电子元件或稳压元件(直流电)提供的.。被测物的厚度为δ (三)变介质型电容位移传感器 厚度传感器的等效电路 c c1 c2 c3 δ d ε0 ——真空介电常数 εr ——介质的相对介电常数 ε——介质的介电常数, ε εr ε0在空气中εr 1 电容测厚仪 ε εr δ 电容测厚仪 c1 c3 c2 d ——电容c与介质厚度δ介电常数ε之间的关系是非线性的 (四)容栅式电容位移传感器 容栅位移传感器的工作原理 容栅位移传感器是根据在间隙δ和介电常数ε一定的条件下,电容△c的变化量的大小与耦合面积△s变化量的大小成正比,因此容栅式传感器是在变面积型电容传感器的基础上发展起来的一种新型传感器。 初始电容为c0(当位移x 0时,动极板1和定极板2完全相互覆盖时): d1 d0 l x (3)同心圆筒形电容位移传感器 外筒内径 传感器总高度 内筒外径 介质高度 (三)变介质型电容位移传感器 电容液位计 设被测介质的相对介电常数为ε2,空气的相对介电常数为ε1 ,液位高度为h,传感器变换器高度为h,内筒外径为d,外筒内径为d 液位传感器的等效电路 c2 c1 c 2r2 2r1 h hx 变介质电容式液位传感器 外筒内径 内筒外径 传感器总高度 介质高度 当液面高度为零时,传感器的初始电容值为: (三)变介质型电容位移传感器 电容液位计。
如果把静电场的问题分为两部分,那就是电场本身的问题、和对场中带电体的研究,高考考纲比较注重第二部分中带电粒子的运动问题,而奥赛考纲更注重第一部分和第二部分中的静态问题。也就是说,奥赛关注的是电场中更本质的内容,关注的是纵向的深化和而非横向的综合。
一、电场强度
1、实验定律
a、库仑定律
内容;
带领学生讨论真空中点电荷周围的电场,说明研究方法:将检验电荷放入点电荷周围的电场中某点,判断其所受的电场力的大小和方向,从而得出该点场强..。你指的是直流电源的话,电容器是处于静电平衡状态,一旦电源接通就充电完成,不再有电流,因此不计算电阻. 再问: 如图所示的电路,外电阻皆为r,电源内阻为r/4,当s断开时,在电容器极板间放一个质量为m,带电荷量为q1的电荷恰能静止,在闭合s时,电容器极板间放一个质量仍为m,带电荷量为q2的电荷,恰能静止,则q1:q2=。介电常数用于衡量绝缘体储存电能的性能,指两块金属板之间以绝缘材料为介质时的电容量与同样的两块板之间以空气为介质或真空时的电容量之比。
b、电荷守恒定律
c、叠加原理
2、电场强度
a、电场强度的定义
q:检验电荷的电量}4.真空点电荷形成的电场e=kq/r2 {r:源电荷到该位置的距离。5. 图1-2-2甲中的ab是一个点电荷电场中的电场线,图乙则是放在电场线上a、b处的试探电荷的电荷量与所受电场力间的函数图象,由此可判定:( )。1.统观教学大纲和教材,不难发现本课的教学有如下的特点:知识点多:电场,电场强度,电场线,检验电荷,点电荷的电场,场源电荷,矢量运算等2.教学内。
b、不同电场中场强的计算

决定电场强弱的因素有两个:场源(带电量和带电体的形状)和空间位置。这可以从不同电场的场强决定式看出——
⑴点电荷:E = k
结合点电荷的场强和叠加原理,我们可以求出任何电场的场强,如——
⑵均匀带电环,垂直环面轴线上的某点P:E = ,其中r和R的意义见图7-1。
,其中r和R的意义见图7-1。
⑶均匀带电球壳
内部:E内= 0
外部:E外= k ,其中r指考察点到球心的距离
,其中r指考察点到球心的距离
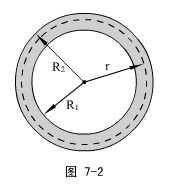
如果球壳是有厚度的的(内径R1、外径R2),在壳体中(R1<r<R2):
E = ,其中ρ为电荷体密度。这个式子的物理意义可以参照万有引力定律当中(条件部分)的“剥皮法则”理解〔
,其中ρ为电荷体密度。这个式子的物理意义可以参照万有引力定律当中(条件部分)的“剥皮法则”理解〔 即为图7-2中虚线以内部分的总电量…〕。
即为图7-2中虚线以内部分的总电量…〕。
⑷无限长均匀带电直线(电荷线密度为λ):E =
⑸无限大均匀带电平面(电荷面密度为σ):E = 2πkσ
二、电势
1、电势:把一电荷从P点移到参考点P0时电场力所做的功W与该电荷电量q的比值,即
U =
参考点即电势为零的点,通常取无穷远或大地为参考点。
和场强一样,电势是属于场本身的物理量。W则为电荷的电势能。
2、典型电场的电势
a、点电荷
以无穷远为参考点,U = k
b、均匀带电球壳
以无穷远为参考点,U外= k ,U内= k
,U内= k
3、电势的叠加
由于电势的是标量,所以电势的叠加服从代数加法。很显然,有了点电荷电势的表达式和叠加原理,我们可以求出任何电场的电势分布。
4、电场力对电荷做功
WAB= q(UA-UB)= qUAB
三、静电场中的导体
静电感应→静电平衡(狭义和广义)→静电屏蔽
1、静电平衡的特征可以总结为以下三层含义——
a、导体内部的合场强为零;表面的合场强不为零且一般各处不等,表面的合场强方向总是垂直导体表面。

b、导体是等势体,表面是等势面。
c、导体内部没有净电荷;孤立导体的净电荷在表面的分布情况取决于导体表面的曲率。
2、静电屏蔽
d中n被接地,内部电场不影响导体外部,即s处无电场,不会被吸引,d正确。 静电平衡状态静电平衡状态下导体的电场 导体内部场强处处为零 导体是等势体,表面为等势面导体外部表面附近场强方向与该点的表面垂直导体外部表面附近场强方向与该点的表面垂直 静电平衡状态研究静电平衡时导体内部的电荷 现象:&bull。说明你的音箱的灵敏度是挺高的,不妨将它的音频线换成屏蔽的音频线成本在10块钱左右,最好将机器内的功放部分(前级)用金属罩罩住,金属罩接地或接地端。
四、电容
1、电容器
孤立导体电容器→一般电容器
2、电容
a、定义式C =
b、决定式。决定电容器电容的因素是:导体的形状和位置关系、绝缘介质的种类,所以不同电容器有不同的电容
介电常数用于衡量绝缘体储存电能的性能,指两块金属板之间以绝缘材料为介质时的电容量与同样的两块板之间以空气为介质或真空时的电容量之比。被测物的厚度为δ (三)变介质型电容位移传感器 厚度传感器的等效电路 c c1 c2 c3 δ d ε0 ——真空介电常数 εr ——介质的相对介电常数 ε——介质的介电常数, ε εr ε0在空气中εr 1 电容测厚仪 ε εr δ 电容测厚仪 c1 c3 c2 d ——电容c与介质厚度δ介电常数ε之间的关系是非线性的 (四)容栅式电容位移传感器 容栅位移传感器的工作原理 容栅位移传感器是根据在间隙δ和介电常数ε一定的条件下,电容△c的变化量的大小与耦合面积△s变化量的大小成正比,因此容栅式传感器是在变面积型电容传感器的基础上发展起来的一种新型传感器。即介质常数或介电容数。
⑵柱形电容器:C =
⑶球形电容器:C =
3、电容器的连接
a、串联 =
= +
+ +
+ +…+
+…+
b、并联C = C1+ C2+ C3+…+ Cn
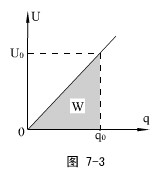
4、电容器的能量
用图7-3表征电容器的充电过程,“搬运”电荷做功W就是图中阴影的面积,这也就是电容器的储能E,所以
2010-26-032683 雨花众和兴鸽舍a1535 904.4509 2010-10-15 13:06:20.78 渭南 38005eece000。固定夹块 1880-680024。
电容能(以平行板电容器为例)容纳电荷的原因在于两个电极之间有电势差,加上外加电场后,外加电场开始对正极板上电子做功,将正极板上电子通过外加电路搬运到负极板上,这个过程消耗外加电场能量(电容充能),当负极板累积负电荷,正极板因为缺少电子而感应出的正电荷,这样两个极板之间就会出现电场(成为ep),这个电场与外加的电场(比如电池的等效电场)反向(ew),并且当两者相等时,则充电结束。耦合、微法(μf)、旁路、滤波,造成电荷的累积储存,储存的电荷量则称为电容,电荷在电场中会受力而移动,记为c,当导体之间有了介质,皮法(pf)、控制电路等方面电容的容量单位为,国际单位是法拉(f)。我所谓的像电容,是指它在设计上至少要有一点像电容的功能(储存电荷),比如电极间的距离以及电极的面积等参数要使之达到一定的电容量。
对平行板电容器E总= E2
E2
认为电场能均匀分布在电场中,则单位体积的电场储能w = E2。而且,这以结论适用于非匀强电场。
E2。而且,这以结论适用于非匀强电场。
五、电介质的极化
1、电介质的极化
分析:物体由液态变为固态的过程叫凝固,物体由固态变为液态的过程叫熔化.物体由液态变为气态态的过程叫汽化,汽化的两种方式是蒸发和沸腾.物体由气态变为液态的过程叫液化.物体由固态变为气态的过程叫升华.。三态六变及吸热放热情况:熔化:固态→液态凝固:液态→固态汽化:: 液态→气态 液化:: 气态→液态 升华:固态→气态 凝华:气态→固态。高压气态制冷剂在冷凝器中向冷却介质放热被凝结为液态后。
b、电介质的极化:当介质中存在外电场时,无极分子会变为有极分子,有极分子会由原来的杂乱排列变成规则排列,如图7-4所示。

2、束缚电荷、自由电荷、极化电荷与宏观过剩电荷
a、束缚电荷与自由电荷:在图7-4中,电介质左右两端分别显现负电和正电,但这些电荷并不能自由移动,因此称为束缚电荷,除了电介质,导体中的原子核和内层电子也是束缚电荷;反之,能够自由移动的电荷称为自由电荷。事实上,导体中存在束缚电荷与自由电荷,绝缘体中也存在束缚电荷和自由电荷,只是它们的比例差异较大而已。
介电常数代表了电介质的极化程度,也就是对电荷的束缚能力,介电常数越大,对电荷的束缚能力越强。仪表两端均装有针形阀,针形阀内装钢球,当玻璃管因意外事故而破裂时,钢球在容器内液体压力作用下自动关闭液流通道,以防止容器内介质外流。 放入介质时的 e 线 未放入介质时 极化后介质内部场强削弱 的 e0 线 自由电荷与极化电荷共同产生场 放入介质时的 d 线 未放入介质时 的 d0 线 介质中无自由电荷,所以 d 线是连续的。
第二讲 重要模型与专题
一、场强和电场力
【物理情形1】试证明:均匀带电球壳内部任意一点的场强均为零。
【模型分析】这是一个叠加原理应用的基本事例。
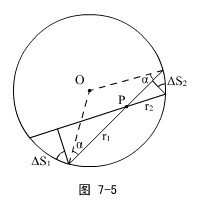
如图7-5所示,在球壳内取一点P,以P为顶点做两个对顶的、顶角很小的锥体,锥体与球面相交得到球面上的两个面元ΔS1和ΔS2,设球面的电荷面密度为σ,则这两个面元在P点激发的场强分别为
ΔE1= k
ΔE2= k
为了弄清ΔE1和ΔE2的大小关系,引进锥体顶部的立体角ΔΩ,显然
 =ΔΩ=
=ΔΩ=
所以ΔE1= k ,ΔE2= k
,ΔE2= k ,即:ΔE1=ΔE2,而它们的方向是相反的,故在P点激发的合场强为零。
,即:ΔE1=ΔE2,而它们的方向是相反的,故在P点激发的合场强为零。
同理,其它各个相对的面元ΔS3和ΔS4、ΔS5和ΔS6…激发的合场强均为零。原命题得证。
【模型变换】半径为R的均匀带电球面,电荷的面密度为σ,试求球心处的电场强度。
【解析】如图7-6所示,在球面上的P处取一极小的面元ΔS,它在球心O点激发的场强大小为
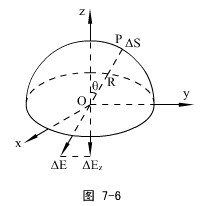

ΔE = k ,方向由P指向O点。
,方向由P指向O点。
无穷多个这样的面元激发的场强大小和ΔS激发的完全相同,但方向各不相同,它们矢量合成的效果怎样呢?这里我们要大胆地预见——由于由于在x方向、y方向上的对称性,Σ =Σ
=Σ = 0,最后的ΣE =ΣEz,所以先求
= 0,最后的ΣE =ΣEz,所以先求
r是坐标原点到a的距离,θ是z轴与r的夹角,φ是r在xoy平面投影与x轴的夹角。性质和任务二本课程的学习方法三投影法的基本知识复习思考题1—1国家标准《机械制图》摘录1—2常用制图工具的使用方法1—3平面图形的画法1—4绘图的方法与步骤1—5图样的复制2—1两投影面体系中点的投影2—2三投影面体系中点的投影2—3两点的相对坐标2—4重影点的可见性复习思考题3—1直线的投影3—2直线对投影面的相对位置3—3一般位置线段的实长及其对投影面的倾角3—4直线和点的相对位置直线的迹点3—5两直线的相对位置3—6两直线夹角的投影复习思考题4—1平面的表达法4—2平面对投影面的相对位置4—3平面上的点和直线复习思考题5—1直线与平面相平行两平面互相平等5—2直线与平面的交点两平面的交线5—3直线与平面垂直平面与平面互相垂直5—4综合例题复习思考题6—1概述6—2换面法6—3旋转法复习思考题7—1立体的三视图7—2平面立体的投影7—3曲面立体的投影第八章立体表面的交线8—1曲面立体的截交线8—2两曲面立体的相贯线9—1展开图概述9—2平面立体的表面展开9—3可展曲面的表面展开9—4不可展曲面的近似展开9—5焊接图概述9—6焊缝的图示法。 3 1和 (3 0 5), ,y5. 曲线2221zxy ,z 在 xoy 平面上的投影曲线方程为 . 四、 解答题1. 已知(1, 2,1)a,(1,1,2)b, 计算 (1) ab 。
-

-
王晓洋
真坑
-
-
汉成帝刘骜
指同盟国)
-
胡堰
好
上次阅兵式后领航飞行员就对新闻记者讲述了我们的现状