最新教学资源打造完美教学模式第三章手动操纵工业机器人31机器人运动轴

-可编辑、修改和打印。不要找到你想要的。有优质的教材、完备的书籍、教案、试卷、教学课件、教学设计等一站式服务。第三章工业机器人的手动操作 31 机器人运动轴与坐标系 311 机器人运动轴名称 312 机器人坐标系类型 32 示教器学习目标的识别与使用 导入案例类 认知拓展与提升 本章小结思维练习 33 机器人安全操作程序 331 示教和手动机器人 332 复制和生产运行 34 手动移动机器人 341 运动模式 342 典型坐标系下的手动操作 课前复习工业机器人主要由哪些部分组成 如何区分工业机器人的点运动 连续路径运动学习目标 识别目标 了解工业机器人的安全操作规程 熟悉示教器的按钮和使用功能 掌握机器人运动轴和坐标系 掌握手动移动机器人的过程和方法 能力目标 精通机器人坐标系ms 和运动轴 选择能够使用示教器熟练操作机器人实现点动和连续运动。进口案例 Universal Robots 推出了革命性的新型工业机器人 UR5。该机器人重量非常轻,仅为 184kg,可在生产现场轻松移动,无需繁琐的安装和设置。可快速融入生产线,与员工互动协作。编程过程可通过示教编程方式实现。用户可以手持UR机械臂,手动引导机械臂按照所需的路径和运动方式运行机械臂。一旦 UR 机器人可以自动记住运动路径和模式 机器人通过独特而友好的图形用户界面进行操作。触摸屏上有广泛的功能,允许用户选择任何重复的生产过程来使用它并从中受益。课堂认知 31 机器人运动轴与坐标 系统名称 311 机器人运动轴根据其功能通常分为机器人轴基轴和刀具轴基轴和刀具轴。外轴统称为外轴。典型机器人机械手中运动轴的定义。每个运动轴A1A2和A3三轴1轴2轴3轴称为基本轴或主轴,以确保末端执行器到达工作空间中的任何位置。 A4、A5、A6三轴轴4轴5轴和轴6轴称为腕轴或副轴。实现末端执行器


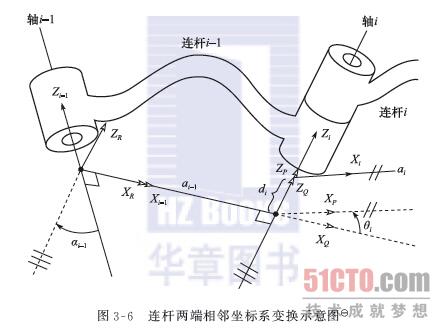
任意空间姿态 312 机器人坐标系类型 目前,大多数商业工业机器人系统都可以使用关节坐标系直角坐标系 工具坐标系和用户坐标系,而工具坐标系和用户坐标系属于直角坐标的范畴系统。 TCP是机器人系统的控制点。出厂默认值位于最后一个运动轴或安装法兰的中心。安装工具后,TCP点会发生变化。大范围运动可选择关节坐标系,不需要TCP姿势。 2 笛卡尔坐标系、世界坐标系、地球坐标系。机器人示教和编程中经常使用的坐标系之一。原点定义在机器人安装面与第一旋转轴的交点处,X 轴向前,Z 轴向上,Y 轴由右手定则确定。笛卡尔坐标系的原点由笛卡尔坐标系的轴决定。工具坐标系的原点定义在 TCP 点,假设工具的有效方向为 X 轴。一些机器人制造商将工具的有效方向定义为Z轴,Y轴和Z轴由右手定则确定。该坐标系最适合执行不改变刀具相对于工件的姿态的平移操作。可根据需要定义坐标系。当机器人配备多个工作台时,可以选择用户坐标系,使操作更容易。在用户坐标系中,TCP 点将沿用户定义的坐标轴方向移动。用户坐标系原点用户坐标系统下各轴的动作提示不同的机器人坐标系具有相同的功能,即机器人在关节坐标系中完成的动作也可以在直角坐标系中实现。机器人在关节坐标系中的动作是单轴运动,在笛卡尔坐标系中。是多轴联动,除关节坐标系外,其他坐标系均可实现控制点的恒定运动,只改变刀具姿态,不改变TCP位置。机器人TCP标定时,常采用关节坐标系下的单轴运动直角坐标系。多轴协同运动下 32 识别和使用示教器 ABBFlexPendantKUKAsmartPADFANUCiPendantYASKAWADX100 工业机器人行业四大巨头最新的示教器产品 示教器主要由显示屏和各种操作按钮组成。显示屏主要有4个显示区,构成一个菜单显示区。显示操作画面的主菜单和子菜单的通用显示区可以在通用显示区中查看


显示和编辑运行程序特征文件的各种设置。状态显示区显示系统的当前状态,例如机器人的运动坐标系。在机器人示教或自动运行过程中显示功能图标和系统错误信息。示教器的按键设置主要有急停键、安全开关、坐标选择键、轴操作键、点动键、速度键、光标键、功能键、模式旋钮等序列号键名。功能1 紧急停止按钮通过切断伺服电源立即停止机器人和外轴操作。一旦按下开关保持急停状态,顺时针旋转解除急停状态。 2 安全开关确保操作者在操作过程中的安全。位置伺服电源只能移动机器人。一旦松开或紧压伺服电源,机器人立即停止移动。 3 坐标选择键 手动操作时,可以在关节直角工具、用户等常用坐标系中选择机器人的运动坐标选择键。按一次坐标系,改变四轴操作键一次。操作机器人各轴的按键只能通过按住轴操作键进行操作。机器人可以通过按下两个或多个键来操作多个轴。 5个速度键用于手动操作。调整机器人速度的键 6 个光标键使用这些键在屏幕上向某个方向移动光标 7 个功能键使用这些键根据屏幕显示执行指定的功能和操作 8 个模式旋钮选择模式示教机器人控制柜模式 重新出现自动模式和远程控制模式 33 机器人安全操作规则 331 示教和手动机器人时 1 不要用力晃动机器人手臂或在机器人手臂上悬挂重物 2 不要戴手套,佩戴和使用教学时规定的工作服、安全鞋、安全帽、防护装备等。 3 未经允许不得进入机器人工作区。调试人员进入机器人工作区时,必须随身携带示教器,防止他人误操作。 4 示教前请仔细确认示教器的安全保护装置是否能正常工作。急停键、安全开关等。 5 手动操作机器人时,应使用较低的倍率速度,以增加控制机器人的机会。 6 在按下示教器上的轴操作键之前机器人教案模板,应预先考虑机器人的运动趋势 7。避开机器人的运动轨迹,确认路径不受干扰。 8 发现危险立即


在复制和生产操作过程中按下急停按钮停止机器人操作 332 1 机器人处于自动模式时,严禁进入机器人本体运动范围 2 在运行操作程序之前,您必须了解所有机器人将按照编程的程序执行的任务 3 使用 操作其他系统编译的程序时,必须先对其进行跟踪并确认其动作,然后才能使用该程序。 4. 您必须知道将移动机器人的所有开关传感器和控制信号的位置和状态。 5. 必须了解机器人控制器和外围控制设备的紧急情况。停止按钮的位置准备在紧急情况下按下这些按钮。 6 千万不要以为机器人一动不动就完成了它的程序。这时,机器人很可能正在等待输入信号以保持其移动。 34 手动移动机器人 341 移动方式 1 Jog 点动机器人是通过点击微轴操作键来移动机器人手臂的方式。每次点击 或微轴操作键,机器人移动一定距离。 2 连续运动 机器人连续运动是按住拨动轴操作键移动机器人手臂。机器人的连续运动主要用于示教距离目标位置较远时。机器人连续运动 342 典型坐标系手动操作 1 关节 坐标系关键步骤 系统上电 → A 站机器人手动示教 → 选择关节坐标系 → 将机器人移至 B 站旋转旋转机→B站机器人手动示教站B双站操作双站位移机器操作站A站A站B站A提示机器人外轴的运动控制只能在关节坐标系下进行2个关键步骤直角坐标系工作姿势→选择直角坐标系→移动机器人到直线轨迹起点→选择直角坐标系Y轴→移动机器人到直线轨迹终点工作轨迹终点→选择工具坐标系X轴→将机器人移动到安全位置。末端避刀动作提示 如果将刀具的有效方向设置为工具坐标系的Z轴,那么末端避刀动作应该是Z 手动移动机器人移动的基本操作过程可以在之前的准备中总结教学和手动移动机器人。需要注意的是,手动操作机器人移动时,机器人移动数据会发生变化。


未保存的手动移动机器人操作流程扩展和提高机器人TCP工具中心点校准工具坐标系的精度直接影响机器人的轨迹精度默认工具坐标系的原点位于机器人安装法兰的中心安装方式不同时 对于焊枪等工具,工具需要获取用户自定义的直角坐标系 a 不是 TCP 标定 b TCP 标定 机器人工具坐标系标定 目前,机器人工具坐标系标定方法主要有外参考法和多点校准方法 1 仅外参考校准方法 需要将工具对准某个测量的外参考点才能完成校准。校准过程快速简单,但这种校准方法取决于机器人的外部参考。 2 多点标定法 该类标定包括工具中心点 TCP 位置多点标定和工具坐标系 TCF 姿态多点标定 TCP 位置标定是使多个标定点的 TCP 位置重合计算 TCP,如如四点法。末端关节坐标系的姿态如五点法、六点法、TCP六点法。步骤 1 在机器人运动范围内找到一个准确的固定点作为参考点。 2 在刀具上确定一个参考点,最好是刀具中心点 TCP3 在四种不同的刀具姿态下,移动刀具的参考点尽可能靠近固定点。 4 机器人控制柜可以通过前4个点的位置数据计算出TCP的位置。 TCP 的姿势可以通过最后 2 个点来确定。 5 根据实际情况设置刀具质量和重心位置数据 a 位置点 1b 位置点 2c 位置点 3d 位置点 4e 位置点 5f 位置点 6 TCP 校准过程提示 TCP 校准操作以副轴手腕为基准轴靠近参考点 为了降低速度避免碰撞,TCP 校准后,可以将控制点固定在关节坐标系以外的坐标系中,以验证校准效果。如果使用搬运夹具,TCP 设置方法如下: 例如结构的对称重心在默认工具坐标系的Z 方向上偏移一定距离。您可以直接在设置页面手动输入偏移值。质量数据。夹爪 TCP 校准。两种体轴都属于机器人本身的外轴,包括基轴和工装轴。目前有四种坐标系可以用于大多数商业工业机器人系统。

标准系统笛卡尔坐标系工具坐标系和用户坐标系。关节坐标系和笛卡尔坐标系在机器人手动操作和作业示教中使用最多。手动操作的工业机器人由示教器上的机器人运动轴手动控制。按下按钮使机器人在某个坐标系或多个坐标系中移动到某个位置的方法一般采用点动和连续运动两种方式来实现点动机器人主要用于距离目标位置较近的场合,而连续移动机器人则用于远离目标位置的场合。思考题 1 填空题 1 一般来说,机器人运动轴按其功能可分为____________和工装轴________和工装轴_______ 2。刀具不会改变刀具相对于工件的姿态。使用_______坐标系进行平移操作。 3 当机器人到达更接近目标工作位置的位置时,尽量使用_______操作方式完成精确定位。 2 选择 1 工业机器人常用的坐标系有①关节坐标系 ②直角坐标系 ③工具坐标系④用户坐标系 A①②B①②③C①③④D①②③④2 示教器的显示屏多为彩色触摸屏机器人教案模板,可显示图像数字、字母和符号,并提供一系列图标来定义屏幕上的各种功能。屏幕显示区可分为①菜单显示区②一般显示区③人机对话显示区④状态显示区A①②B①②③C①③D①②③④3判断1在直角坐标系下,机器人各轴可实现独立的正向或反向运动。坐标系下实现 3 当机器人出现故障需要进入安全围栏进行维修时,需要在安全围栏外有安全监督员,以便在机器人运行异常时可以快速按下急停按钮。 4 教学时最好照顾好示教器。上手套 5 手动操作移动机器人时,不会保存机器人运动数据。 4 综合应用 使用示教器 路径A→B→C→D→E→F→A 位置移动方式 机器人坐标系点动连续移动关节直角工具 A→BB→CC→DD→EE→FF→A 手动移动机器人。 16
教案网123
不可逞一念之勇