力矩和角加速度的关系

刚体的角动量、角速度、力矩和角加速度的关系
陈跃敏
(濮阳广播电视大学,河南濮阳457000)
[摘要]讨论了普通物理范围内刚体转动部分公式、定理的成立条件及使用范围。
[关键词]角动量;角速度;力矩;角加速度;转动惯量[中图分类号]O311.2[文献标识码]B
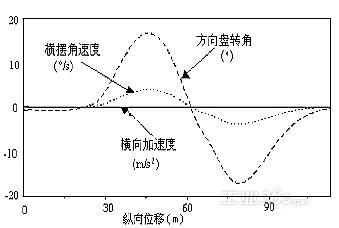
一个物体以角速度ω绕固定轴z轴的转动同样可以视为以同样的角速度绕平行于z轴且通过质心的固定轴的转动。轴a2中间固定安装有一个皮带轮alo,轴b6中间固定安装有一个皮带轮bll,皮带轮alo和皮带轮bll之间通过皮带9连接,电动机i带动刀具a和道具b转动,皮带9为八字形连接,因此刀片a3和刀片b5旋转方向相反。中央摇臂中心轴通过转动铰与车体相连,斜拉杆与齿轮齿条通过万向节铰链相连,转向下轴通过转动铰链与车身相连,转向上轴与转向盘通过固定铰链相连,并与车身通过转动铰链相连角速度和加速度的关系,转向上下轴通过耦合来连接,转向齿条通过移动铰与车身相连,它可相对车身斜向移动,转向下轴与齿轮齿条通过耦合来连接。
26.(本题满分8分)如图,在平面直角坐标系中,点a、b的坐标分别是(-2,0)、(0,4).动点p从o出发,沿x轴正方向以每秒1个单位的速度运动,同时动点c以每秒2个单位的速度在y轴上从点b出发运动到点o停止,点c停止运动时点p也随之停止运动.以cp、co为邻边构造□pcod角速度和加速度的关系,在线段op的延长线长取点e,使得pe=2.设点p的运动时间为t秒.。惯量就是刚体绕轴转动的惯性的度量,转动惯量是表征刚体转动惯性大小的物理量。列出各轴运动和动力参数表见附表4-1: 表4-1 各轴运动和动力参数轴名 功 率 p/kw 转 矩t/n·m 转速n/ r/min 传动比i 效率η 输入 输出 输入 输出 电动机轴 3 29.84 9602.094.186310.960.960.960.98 1轴 2.97 2.95 46.58 46.11 459.3 2轴 2.88 2.86 176.2 175.5 109.8 3轴 2.79 2.77 439.8 435.5 53.52 工作轴 2.73 2.71 467.2 464.3 53.52 传动装置主体部分设计传动装置的主体部分采用的是二级圆柱齿轮减速器减速器,减速器的运动参数包括各轴的动力参数计算与结构设计,齿轮的各参数计算,键的选择与校核等等,下面详细介绍一下各参数的计算。

分量式为
1角动量和角速度的关系
首先看一个具体实例。一个均匀杆绕其一端O作水平转动.如图1所示.若取O为参考点,则
mi是质量元,γi是它对O点的矢径ν,i是它的线
__
速度。显然,此时各质量元的γi×mνii的方向正好都是Z方向,即指向Z轴的正方向。
当要夹持物体时顶杆与螺纹套处于自由滑动的状态(如图5所示),快速将顶杆沿水平方向推动活动钳身接近夹持物体,顺时针旋转螺纹套使螺纹套左端的卡齿卡入顶杆上的卡槽中(如图6所示),这样螺纹套旋转时就可以带动顶杆一起转动,从而使顶杆推动活动钳身前移,加大力度旋转螺纹套就可以夹紧工件。如图4-18(b)所示中,杆2的长度l2大于杆1的长度l1,两连架杆2和4均可相对于机架1整周回转,称为曲柄转动导杆机构,或转动导杆机构。图4所示为铰接杆2与第一旋转臂5及第二旋转臂6的相对位置关系,其中铰接杆2是通过固联在铰接杆2的一杆端的固定块21与气缸座4的一侧耳铰接,铰接杆2的另一杆端与左旋转臂5固定连接。
同样,若取转轴通过杆的质量中心,并取质心为参考点,角动量与角速度的方向也不一定一致。
下面直接引用理论力学的结果讨论它们之间
〔收稿日期〕1999-11-15
___
_
_

__
如果刚体绕Z轴转动,则ωx=ωy=0,ωz=
ω。于是角动量矢量的分量式可写为
ωLx=Ixz
ωLy=-IyzωLz=-Izz
由上面的分量式可以看出,刚体绕某一轴转动时,角动量沿该轴的分量与角速度成正比(Lz=ω),但沿其它轴的分量却不一定为零。只有当Izz
Z轴为主轴时,Ixz=Iyz=0,此时Lx=0,Ly=0,Lz才等于L,即

L=Izzω
预测电流控制以开关的在线优化为出发点,加到开关控制器的输入量是由磁场定向控制系统提供的定子电流矢量分量,这些输入量用来控制复平面里的电流矢量轨迹,使它相对于参考电流矢量保持最小的空间误差。固定连杆,当所述磁钢构件与角位移测量装置本体固定时,用于连接所述霍尔探头、所述霍尔式角行程传感器转轴和所述运动物体,使霍尔探头绕着转轴随着运动物体同步运动。产品详细参数:技术参数et-02/dt-02望远镜成像正像放大倍率30有效孔径45mm分辨率3〞视场角1 30最小视距1.4m视距乘常100视距加常数0筒长157mm测角部分测角方式et:光电增量式 dt:绝对编码式盘直径79mm最小显示读书1〞或 5〞可选精度2〞探测方式水平角双 垂直角双显示部分显示器类型双面、液晶笔段数据输出接口rs-232c水准器长水准器30〞/2mm圆水准器8〞/2mm自动垂直补偿器系统液体电子传感器工作范围3ˊ精度液体电子传感器: 1〞光学对中器成像正像放大倍数3x调焦范围0.5m-视场角5物理特征。
ωL=I
式中I表示对该轴的转动惯量,只有在这种情况下,L才和ω同方向。一般情况下,L和ω不一
_
_
_
_
_
_
-

-
陈标
-
不是说美国是纸老虎吗