速率陀螺仪和积分电路 稳定系统中惯性MEMS的频率响应(2)
率响应在IMU和陀螺仪的规格表中表示为"带宽"。作为一个性能参数,它表示某个频率,输出信号幅度在该频率下降低到传感器遇到的实际运动幅度的大约70% (–3 dB)。某些情况下,带宽可也定义为输出响应落后于实际运动90度时的频率(对于双极系统)。这两个指标可以直接影响控制环路的一个重要稳定准则:单位增益、相位裕量—环路响应的实际相位角度和–180°之间的差值,环路增益为1。了解反馈传感器的频率响应,是优化稳定性保证和系统响应之间的平衡的关键因素。除了管理稳定性标准之外,频率响应还会对振动抑制和制定采样策略产生直接影响,通过这些策略可以测量惯性平台上的所有关键瞬态信息。速率陀螺仪和积分电路
要分析系统中的频率响应,首先要从一个高层次"黑盒子"视图开始,它描述了系统在整个目标频率范围内对输入的响应。在电子电路中,输入和输出是从一般意义上定义的,例如信号电平(伏特),分析通常包括开发传递函数,使用s域表示和电路-电平关系,例如基尔霍夫的电压和电流定律。对于惯性MEMS系统,输入是IMU遇到的惯性运动,输出通常以数字码表示。s域分析技术固然有很大作用,但要为这种类型的系统开发完整的传递函数,通常还需要采用其他技术,并且考虑到更多问题。
开始分析过程时,首先要了解与传感器信号链相关的所有组件。图3提供了典型函数的整体示意图。信号链从核心传感器元件开始,它将惯性运动转化为代表性的电信号。如果带宽在传感器元件中未受限制,则通常受ADC模块前的信号调理电路中的滤波器限制。信号数字化后,处理器通常应用纠错(校准)公式和数字滤波。第二级的数字滤波器会减小反馈系统在控制程序中使用的带宽和采样速率。所有这些级都可能影响传感器信号的增益和相位,与频率相关。图3提供了一个示例,IMU在混合信号处理系统中具有多个滤波器。该系统可作为一些实用分析技术的示例。
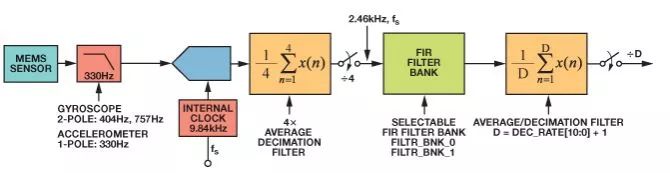
图3. 信号链中用于频率分析的ADIS16488传感器

核心 MEMS 传感器元件
要进行此类分析,必须了解可以量化和应该量化的所有行为,然后可对那些无法轻易量化的行为做出合理假设。充分了解"已知"可变因素之后,通常可以更加简单地重新评估这些假设以进行检查和澄清。ADIS16488的规格表(图3)显示了330 Hz的–3 dB带宽。假定核心传感器处于临界阻尼状况,而且在远低于其谐振范围(16 kHz至20 kHz)的带宽下并非主要贡献因素。这种情况并非总会出现,但它是一个很好的起点,可以使用噪声密度或完全运动测试,稍后在流程中测试到。


接口电路/模拟滤波器
此外,每个陀螺仪传感器在通过ADC模块之前都会通过双极低通滤波器。这样可以提供足够的信息,以便使用拉普拉斯变换来开发S域中的传递函数表示。第一极(f1)的频率为404 Hz,第二极(f2) 的频率为757 Hz。
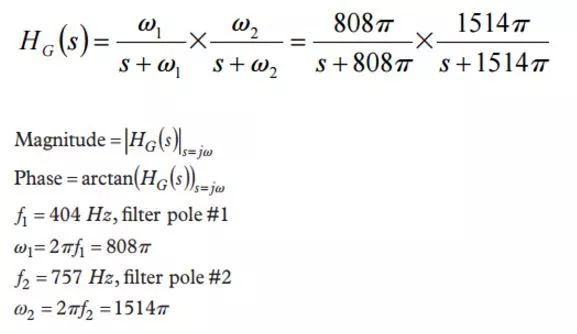
加速度计的单极 (f1)传递函数为:

这些公式为程序中的数字分析提供了依据,这些程序可管理与"s = jω"恒等式相关的复数。在MATLAB中,以下的m-脚本将生成幅度(比率,无单位)和相位(度)信息:
Fmax = 9840/2; % one-half of the sample rate
for f = 1:Fmax
w(f) = 2*pi*f;
end
p1 = 404; % pole location = 404Hz
p2 = 757; % pole location = 757Hz
NUM1 = 2*pi*p1;
DEN1 = [1 2*pi*p1];
NUM2 = 2*pi*p2;
DEN2 = [1 2*pi*p2];
-

-
李昕
打他呢
-
”“你记错了