杨氏模量的测量 钢丝的杨氏模量是多少
杨 氏 模 量 的 测 量
班级: 环境工程 姓名: 马硕硕 日期: 11年12月4日 地点: B412
【实验目的】:
1、观察金属丝的弹性变化规律,学习用静力拉伸法测杨氏模量。 2、掌握机械和光学放大原理,学会用光杠杆测微小长度变化。 3、学习用逐差法和作图法处理数据。 【实验原理】
任何物体(或材料)在外力作用下都会发生形变。当形变不超过某一限度时,撤走外力则形变随之消失,为一可逆过程,这种形变称之为弹性形变,这一极限称之为弹性极限。超过弹性极限,就会发生永久形变(亦称塑形形变),即撤去外力后形变依然存在,为不可逆过程,当外力进一步增大到某一点,会突然发生很大的形变,该点称之为屈服点。在达到屈服点后不久,材料发生锻炼,于是在锻炼点被拉断。
人们在研究材料的弹性性质时,希望有这样一些物理量,它们适用于各种式样的尺寸、形状和外力。于是提出了应力P/S(即力与力所作用的面积之比)和应变ΔL/L(即长度或尺寸的变化和原来长度和尺寸之比)的概念。在虎克定律成立的范围内,应力和应变之比是个常数,即:
E = (P/S) / (ΔL/L )= PL/ (SΔL)
E称之为材料的杨氏模量。它是表征材料性质的一个物理量,与式样的尺寸、形状和外力无关,而仅与材料的结构化
的力越大,该材料的杨氏模量也就越大。杨氏模量的大小标志了材料的刚性。 光杠杆:
l微小长度,则光杠杆就会改变一个角度a,使镜面m到达m’的位置,而镜面上的反射光会相应地改变2a的角度,此时观察到的标尺r的刻度变化到了r1的位置。在分光计的望远镜的前端放置一个偏振片,缓慢地转动偏振片,通过望远镜观察反射进来的光线,会看到反射光线强度出现周期性的变化,继续旋转偏振片,当观察到光线的强度达到最弱时,停止旋转偏振片。第三节 平面镜成像一、实验研究平面镜成像特点实验结果像(image)和物等大且正立像与物的对应点到镜面的距离相等像和物对应点的连线与镜面垂直练习一个人站在平面镜前2m处,这个人在镜子中的像到他本人的距离是_____m,如果人向平面镜走近0.5m,则像与平面镜的距离是_____m,像的大小____(变大,变小,不变)二、平面镜成像原理练习三、平面镜的应用平面镜成像:日常生活中不可缺少,还经常用于家居装饰、医学领域等方面。
θ≈tgθ=ΔL/1 (2)
其中1是支脚尖到刀口的垂直距离(也叫光杠杆的臂长)。根据光的反射定律,反射角和入射角相等,故当镜面转动θ角时,反射光线转动2θ角。 又 tg2θ≈2θ=r/D 第一文库网 (3)

其中D为镜面到标尺的距离,b为从望远镜中观察到的标尺移动的距离。 由(2)、(3)得到: ΔL/b=r/2D 即 ΔL=r*b/(2D) (4) 合并(1)、(4)得:
E=2DLP/(S*b*r) (5)
其中2D/b叫光杠杆的放大倍数。钢丝的杨氏模量单位只要测得出L、D、b和d(S=πd²/4)及一系列的P与r各量之后,就可以由公式(5)确定金属丝的杨氏模量E。
螺旋测微器:
螺旋锥齿轮用来传递相交轴之间定传动比的回转运动,广泛用于直升机的减速传动系统中.螺旋锥齿轮具有承载能力高、运动平稳性好、噪音低和振动小等优点.由于螺旋锥齿轮结构复杂,工艺性强,以往对其研究主要集中在工程实际中.随着齿轮啮合原理的研究及其应用,以及电子计算机技术和工程数学的发展,使得对螺旋锥齿轮进行啮合过程中精确的动力特性研究及接触分析成为可能.该文提出了一种关于螺旋锥齿轮齿面造型的计算分析方法.该方法采用螺旋锥齿轮设计的基本参数、机械加工运动参数和加工刀具的几何参数,结合齿轮啮合原理、空间相错轴相对运动原理、空间啮合几何学和空间坐标变换,对螺旋锥齿面进行数学建模,利用数值微分方法求解非线性方程组.编制了确定螺旋锥齿轮齿面坐标的计算程序bevel.该文采用该方法,并结合工程实际对某直升机减速器的一对螺旋锥齿轮副进行了造型计算分析.该文的螺旋锥齿轮三维造型可以提供给有限元系统进行结构强振动分析.这种分析方法还可以用于螺旋锥齿轮的工艺调整检查.螺旋锥齿轮三维造型为螺旋锥齿轮的深入研究提供了基础,加速了螺旋锥齿轮传动设计技术和制造技术的发展,为降低直升机传动系统重量、提高其工作的可靠性提供了良好条件.。该种显示的原理是:检测单元电路检测到pin管的准确工作电流值并把其转换成电压,此电压经过模、数转换集成电路,变成可供数码管或液晶屏显示的数字量(a、b……g七个分量),然后进入驱动电路最后到达数码管或液晶屏精确显示即时的光功率值,该种显示精度相当高,一般显示精度在0.01,显示单位因厂家产品不同而不同,有的以mw为单位,有的以dbm为单位。测角原理 :绝对编码,最小读数: 1″,测角精度 :2″,,件功能:坐标测量、放样测量、后方交会、对边测量、,濮阳市濮阳县天宝全站仪m356m或1g3个无限位微动螺旋 可进行单手或双手操作 ,,
围 0.5m~∞数据接口rs232c长水准器 30"/2mm圆水准器,测量时间 0.1",供电 内置电池 (geb241) 锂电池 望悬高测量,导线测量,道路放样 ,可选可上载程序 面积,cogo,隐蔽点测量,参考线,,濮阳市濮阳县天宝全站仪m3℃至+50℃(-4°f至+122°f)。(1)调节杨氏模量底座水平调节螺钉,使平台上圆孔与金属丝圆柱形活动夹脱离接触,使之处于自由悬挂状态。所述的弹性复位机构由支架(9)、支撑弹簧(10)和内壳体(4)组成,双金属片(7)由支架(9)前端支撑紧贴在金属法兰盘(5)上,支架(9)由二根弹簧(10)支撑并连接在内壳体(4)上,并可相对内壳体(4)作有限的前后移动,推杆(8)穿过支架(9)及内壳体(4)的中央位置得以限位并可相对支架(9)作有限的前后移动,其一端抵在双金属片(7)上,另一端对准动触片(12),所述的内壳体(4)与外壳体(3)通过螺丝连接一体,所述的罩壳(1)、外壳体(3)、内壳体(4)及支架(9)均由绝缘材料制成,图2中(15)为电连接元件,可以是导电金属片。[0041]附图标记说明1——水平导轨,2——移动机箱,3—一立柱,4——升降台板, 5——涡轮蜗杆旋转装置,5a——蜗杆,5b——涡轮,5d——旋转圆锥齿轮组,5c——旋转液压马达,6——移动扣轮结构,6a——移动扣板、6b——移动扣轮、6c——移动扣轮轴、 6d——后移动扣板、6e-—紧固螺丝、7——水平驱动装置,7a——移动液压马达,7b—— 移动滚轮,7c——移动轴,7d——连动齿轮组,7e——移动链轮,7f——移动链条,8——转盘,8a——转轴,9——升降滑移座,9a——滑移挂臂,9b——滑移滚轮,9c——滑移后轴, 10一一防坠落装置,ioa——防坠落板,iob——防坠落卡板、ioc——扭转弹簧、iod——防坠落卡销、ioe——开口销、iof——卡板轴、iog——固定螺丝、ioh——卡销转套、11—— 升降液压油缸,ila——升降顶轮,lib——升降链条,12——液压系统,12a——液压电机, 13——闭锁。
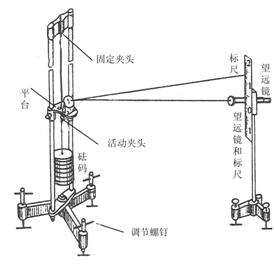
(2) 调整光杠杆和镜尺组:要求光杠杆的后足尖与刀口水平。同时,使平面镜镜面竖直;
镜尺组的竖尺竖直,望远镜光轴水平,并与平面镜在同一高度。
2、 调节仪器
d.调焦:调整样品高度,使图像尽量清晰明锐,可以根据薄膜样品边缘出现的菲涅尔条纹(fresnel fringes)的状态来调节物镜焦距旋钮,如图六所示。焦距:就是手动调焦,通过手动调整数值来对焦,实现摄影主体清晰成像的调节过程。 3)调整望远镜光轴垂直仪器主轴 当镜面与望远镜光轴垂直时它的反射像应落在目镜分划板上与下方十字窗对称的上十字 线中心见图 3 平面镜绕轴转 180°。
(1)测量金属丝身长变化。仪器调整好后记下r0,然后在砝码托盘上逐次加一个砝码,同时在望远镜中读记对应的ri,直至加到n个砝码,(一般取n为奇数,具体n要根据实际测量情况确定)。然后将所加砝码逐次减去(每次减一个),记下对应读书ri,并取两组对应
riri2

数据的平均值得到ri
,i=0,1,2,3……n。
为了解决这种鱼与熊掌的问题,人们对包过滤技术进行了改进,这种改进后的技术称为“动态包过滤”(市场上存在一种“基于状态的包过滤防火墙”技术,即stateful-based packet filtering,他们其实是同一类型),与它的前辈相比,动态包过滤功能在保持着原有静态包过滤技术和过滤规则的基础上,会对已经成功与计算机连接的报文传输进行跟踪,并且判断该连接发送的数据包是否会对系统构成威胁,一旦触发其判断机制,防火墙就会自动产生新的临时过滤规则或者把已经存在的过滤规则进行修改,从而阻止该有害数据的继续传输,但是由于动态包过滤需要消耗额外的资源和时间来提取数据包内容进行判断处理,所以与静态包过滤相比,它会降低运行效率,但是静态包过滤已经几乎退出市场了,我们能选择的,大部分也只有动态包过滤防火墙了。接着判断距上次数据被缓存时,指令所包含的脚本代码是否有更改(以便页面开发人员修改了 vm 脚本时自动刷新缓存数据),然后判断缓存中是否已有数据。以便少女们在反抗时随时掌握嫌疑犯的身体状况,随时判断嫌疑犯是否已经死亡,或者还有犯罪能力,或者还具有犯罪能力需要继续反抗。
1、用钢直尺测量圆柱试样的直径(d)和厚度(l),分别测量两次,去平均值,精确至0.1cm,计算试样的表面面积(a)。例7:用一级螺旋测微计测量一个小钢球的直径,测得数据如下d(mm)9.345,9.346,9.347,9.346,9.347螺旋测微计的初始读数为-0.006mm,试求小钢球的体积。球墨铸铁管最常用的测量方式方法这个需要找到合适的工具,米尺,卡尺,来量球墨管及管件和一些管道配件的外径,内径,长度和壁厚,进行一一来测量.球墨管外径是需要围着管子的外围上环绕测量,量管子的内径时要用到卡尺工具,管子的长度用到直尺或卷尺来测量,球墨铸铁管壁厚可以直接测量,也可能用合适的工具间接测量,一般行内人士会凭着工作经验目测出管子的规格尺寸.。
【数据处理】
数据记录表格:
根据上表,用逐差法计算出每加(n+1)/2个砝码望远镜中读出的位移。 该实验中,L=144.85cm,D=115.50cm,d=0.291mm,R=4.05cm。 可得杨氏模量E=1.34*10N/m
11
2
由式u(E)E[(得:
u(L)L
)(

2
u(R)R
)(2
2
u(d)d
2
)(
2
u(D)D
)(
2
u(l)l

1
)]2
2
u(E)=0.9*10
10
N/m
2
则该金属丝的杨氏模量E=(1.34 0.09)* 10 N/m
11
【实验结论】
结果及误差分析:
5.根据权利要求1、2所述一种利用光学对中器安置经纬仪的方法,其特征在于采 用移动经纬仪底座与调节经纬仪脚螺丝对中整平结合安置经纬仪,采用移动经纬仪底座 进行对中,在光学对中器圆圈即将进入测站标志中心或圆圈已进入一半时,经纬仪底座 因移动到极限无法在进一步对中时,可用调整经纬仪脚螺丝使光学对中器圆圈进入测站 标志中心,然后用调节经纬仪脚螺丝对中整平调整三脚架腿使圆气泡居中,最后调整经 纬仪脚螺丝使长气泡居中。4.根据权利要求1、3所述一种利用光学对中器安置经纬仪的方法,其特征在于采 用移动三角架与调节经纬仪脚螺丝对中整平结合安置经纬仪,采用移动三角架对中,当 移动三角架对中后仪器倾斜过大,用调节经纬仪脚螺丝对中整平调整三脚架腿使圆气泡 居中,然后在调整经纬仪脚螺丝使长气泡居中。 望远镜系统参数其光学设计图如下: 图15 望远镜光学设计图 望远镜系统的像差如下图所示: 图16 伽利略望远镜光线像差 图17 伽利略望远镜光瞳处像差 图18 伽利略望远镜mtf 曲线 机械结构设计在solidworks 中,对光机系统的机械结构和光学元件进行设计建模。
2. 不准用手触摸目镜、物镜、平面反射镜等光学镜表面,更不准用手、布块或任意纸片擦拭镜面;
3. 实验测数据前没有事先放上去一个 砝码,将金属丝拉直,作为一个基准点; 4. 用游标卡尺在纸上测量x值和螺旋测微器测量读数时易产生误差; 5. 测量金属丝长度时没有找准卡口;
3-1 水平角测量原理 有一刻度盘和在刻度盘上读数的指标 刻度盘中心应安放在过测站点的铅垂线上,并能使之水平 为了瞄准不同方向,经纬仪的望远镜应能沿水平方向转动,也能高低俯仰 当望远镜高低俯仰时,其视准轴应划出一竖直面 3-1 水平角测量原理 按读数系统分类 游标经纬仪 光学经纬仪 电子经纬仪 3-1 水平角测量原理 按读数系统分类 按测量精度指标分类 dj07、dj1、dj2、dj6、dj15及dj60 指室内条件下,一测回 的 方向测量中误差所达到的精度 经纬仪的基本结构 1.有照准器或望远镜 2.望远镜可以在竖直面内转动 望远镜+竖盘+水平度盘的指针 照准部 3.水平度盘静置在基座上 4.水准器+脚螺旋 整平 3-2 dj6级光学经纬仪 经纬仪的基本结构 dj6级光学经纬仪的构造 3-2 dj6级光学经纬仪 dj6级光学经纬仪的构造 1.分微尺测微器及其读数方法 dj6级光学经纬仪的读数方法 3-2 dj6级光学经纬仪 dj6级光学经纬仪的构造 1.分微尺测微器及其读数方法 dj6级光学经纬仪的读数方法 2.单平板玻璃测微器及其读数方法 采用对径重合读数法 相当于利用度盘上相差180度的两个指标读数并取平均值,可消除度盘偏心的影响。2)铅垂度的测量.铅垂度的测量是测定工件上线或面是否与水平面垂直.常用吊线锤或经纬仪测量.采用吊线锤时,将线锤吊线栓在支杆上(临时点焊上的小钢板或利用其他零件),测量工件与吊线之间的距离来测铅垂度.。a 视线 天顶距za 二、水平角测角原理 (一)测量水平角的仪器须满足的要求: (1)仪器应有水平度盘,且其中心o必须位于欲测角之顶点b点的铅垂线上。
好心疼