机器人教案模板(ABB工业机器人编程第九章ABB机器人码垛应用案例描述)
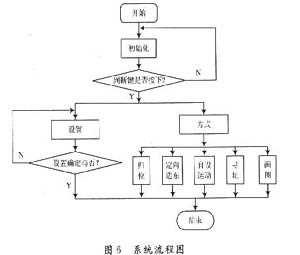
ABB工业机器人编程第9章ABB机器人码垛应用案例工作站说明码垛是物流自动化技术领域的一项新兴技术。码垛需要将袋子和箱子等物品按照一定的图案和顺序放置在托盘上。以实现物料搬运、仓储、装卸、运输等物流活动。本项目工作站机器人采用ABB IRB460工业机器人,控制柜采用ABB IRC5控制柜。工业机器人对传送带传送的物体进行码垛。第九章ABB机器人码垛应用案例工作站 描述 码垛机器人工作站由IRB460机器人、吸盘工具、传送带、控制柜、码垛托盘组成。机器人的端部法兰配有吸盘工具。第九章ABB机器人码垛应用案例工作站介绍码垛机器人工作站的工作过程:输送带将物体输送到输送带末端,安装在输送带末端的传感器检测物体是否到位,物体到位后信号传送给机器人机器人教案模板,机器人端吸盘工具吸住物体,然后机器人将物体送入码垛托盘。码垛物体尺寸为600mmx400mmx200mm,码垛方式如下图所示。第九章ABB机器人码垛应用案例9.1 通讯板配置 1 在本工作站配置一块DSQC652通讯板(数字16进16出),总线地址为10。单机的“控制器”。
第九章ABB机器人码垛应用案例9.1 通讯板配置 2 将示教器的工作模式切换为“手动”模式。 Point 1 Point 2 Point 3 Point 4 第九章ABB机器人码垛应用案例9.1 通讯板配置 3 打开示教器菜单栏中的“控制面板”。第九章ABB机器人码垛应用案例9.1 通讯板配置 4 点击“控制面板”下的“配置”。第九章ABB机器人码垛应用案例9.1通讯板配置5双击“DeviceNet设备”配置通讯板第九章ABB机器人码垛应用案例9.1通讯板配置6点击“添加”第九章ABB机器人码垛应用案例9.1 通讯板配置 7 将“Use Value From Template”改为“DSQC 652 24 VDC I/O Device” 第9章ABB机器人码垛应用案例9.1 通讯板配置 8 将通讯板名称改为《BOARD10》第九章ABB机器人码垛应用案例9.1通讯板配置9修改通讯板地址“地址”为“10”第九章ABB机器人码垛应用案例9.1通讯板配置10点击“确定”章节9 ABB机器人码垛应用案例9.1 通讯板配置 11 提示重启时点击“否”。示教设备,信号创建后重启 第九章ABB机器人码垛应用案例9.1 通讯板配置 12 点击“返回” 第九章ABB机器人码垛应用案例9.2 IO信号配置1 本工作站共有2个数字输出和输入信号。在示教器上,点击“菜单”-“控制面板”-“配置”,然后双击“信号”进入IO信号配置章节9 ABB机器人码垛应用案例9.2 IO信号配置2点击“添加》第九章ABB机器人码垛应用案例9.2 IO信号配置3 添加数字量输入信号diBoxInPos,即物品到位传感器第九章ABB机器人码垛应用案例9.2 IO信号配置4添加数字量输出信号doGripper 表示机器人末端执行器吸盘动作信号第九章ABB机器人码垛应用案例9.3 本工作站设置工具坐标系,工具部分为吸盘工具,需要创建 tGripper 工具坐标系。

刀具坐标系沿默认坐标系tool0的正Z轴偏移160mm,刀具自身负载1Kg,其他值保持默认。第九章ABB机器人码垛应用案例9.3工具坐标系设置第九章ABB机器人码垛应用案例9.3工具坐标系设置第九章ABB机器人码垛应用案例9.3工具坐标系设置第九章ABB机器人码垛应用案例应用案例9.3 工具坐标系设置第九章ABB机器人码垛应用案例9.3工具坐标系设置第九章ABB机器人码垛应用案例9.4 在本工作站设置工件坐标系,工件坐标系统采用系统默认的初始工件坐标系(该工作站的Wobj0与机器人底座的标准系统重合)。 9.5 Payload 设置 本工作站负载数据采用系统默认初始负载数据load0。第九章ABB机器人码垛应用案例9.6 创建logo 1)tray full logo bPalletFull(1)在“程序数据”窗口的视图下拉菜单中选择“所有数据类型”,然后找到并选择bool数据类型第九章ABB机器人码垛应用案例9.6 创建标志(2)点击“bool”,然后点击“创建”,出现如图3-25所示的“数据声明”窗口。将声明窗口的名称改为 bPalletFull,然后单击“确定”。
第9章ABB机器人码垛应用案例9.6 创建一个标志(3)将其初始值赋给False第9章ABB机器人码垛应用案例9.6创建一个标志2)创建一个工件计数数据nCount (1)nCount为num类型数据,在数据类型窗口中选择num类型数据并点击,出现创建num类型数据窗口,将其名称改为nCount第9章ABB机器人码垛应用案例9.6创建一个标志( 2)赋初值为1。 第9章ABB机器人码垛应用案例9.7 目标点示教 本工作站的关键目标点主要包括:工作原点(pHome)、传送带抓取工件位置(pPick)和放置参考点(pPlaceBase),我们以创建pHome目标点为例,在数据窗口中选择robtarget类型数据并点击,出现创建robtarget类型数据窗口,改名为pHome,存储type 是可变的 第 9 章 ABB 机器人码垛应用程序应用案例9.7 目标点示教 3 目标点数据创建完成 第九章ABB机器人码垛应用案例9.7 目标点示教 示教每个目标点,示教时选择工具坐标tGripper,工件坐标系默认为 Wobj0。 1)pPick 在布局窗口中进行教学并将物品移动到传送带末端机器人教案模板,


教案网123
埋怨命苦真悲哀