如何通俗地解释角动量?
高三……我还是放弃非自旋角动量是空间转动群的生成子这种说法好了……
或者用理论力学中的说法:角动量作为一个守恒量,和动量、能量类似,它也来源于一种对称性,即系统对空间转动的对称性,即随便转动一个角度,系统依然如故,质点还是质点,刚体还是刚体,人还是人……嗯显然这样还是不行……
普通物理的力学会先论证虽然转动操作不可以交换,不可能是矢量,但无穷小转动是矢量。然后用牛顿定律推来推去,定义了一个对应的某个叫做角动量的东西也是矢量。嗯,这样应该也不行……
================================
好,我们先看看动量是怎么来的。首先,对于一个质点,我们有牛顿第二定律:

更一般的物体我们可以用一堆质点来描述,那么每一个质点都有牛顿第二定律:
把这些全加起来,那么有:
(如果你惧怕导数的符号,我们就换一个好了,反正是一个意思。)但我们有牛顿第三定律:这些质点相互之间的力是大小相等方向相反的,所以这些力求和之后都相互抵消了。剩下的是什么呢?是这些质点受到的外力,所以:
好,那么如果合外力等于0,那么我们发现一个东西不随时间变化,是守恒量,于是给它个名字,叫动量:
其动量随时间的变化率同该质点所受的外力成正比并与外力的方向相同。在物体未受外力作用时角动量守恒定律 知乎,内部质点之间本来就有作用力存在,在物体受到外力作用时,由于产生变形(拉力,会使物体伸长,压力,会使物体缩短),质点间就会产生附加的作用力,我们这里说的内力,就是指物体在受到外力作用时内部质点间产生的附加作用力。则质点运动的加速度的大小同作用在该质点上的外力的大小成正比加速度的方向和外力的方向相同。
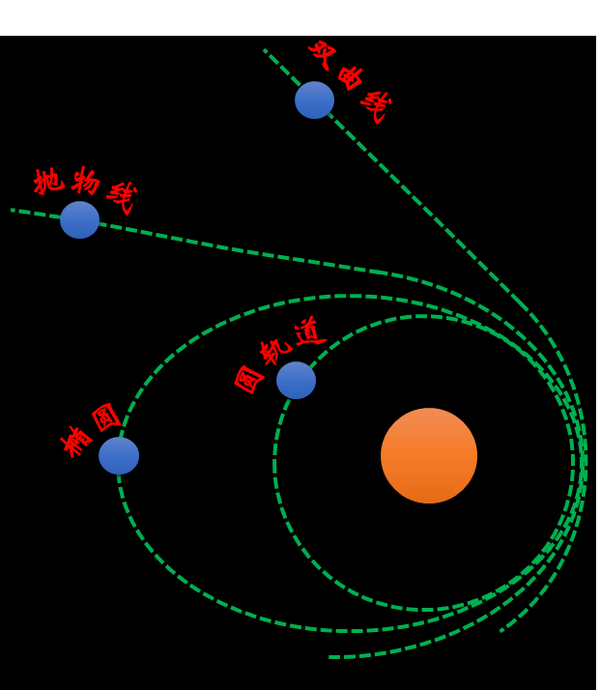
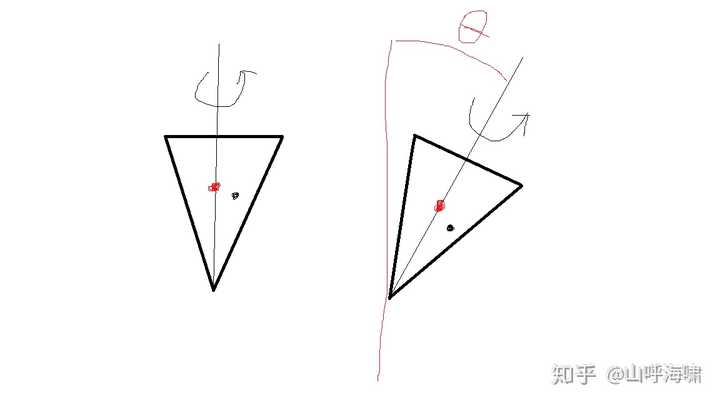
那么下面我们来考虑考虑转动。但是转动这件事很蛋疼,因为既然在转动,不是匀速直线运动,那么肯定有不为0的外力咯!回想一下高中学的匀速圆周运动,虽然速度大小不变,但是受到向心力的驱使下,方向是在匀速变化。需要注意的是,从转动的中心来看,向心力的方向此时和物体的方位是重合的,而速度的方向和物体的方位是垂直的。
更重要的是开普勒通过观察天文总结出一件事,被称为开普勒第二定律:行星轨迹单位时间内扫过的面积是定值。而行星受到的力都是指向一个中心的,即太阳。而面积这个东西怎么算?我们知道数学上有个叫叉乘的东西可以算两个向量张成的平行四边形的面积。而我们现在有这么些个向量:质点的位置,质点受到的力
,质点的速度
,加速度
……而行星轨迹单位时间扫过的面积……不就是
么……然后我们回过头来看看牛顿第二定律
,把脑洞打开,方程左右两边都做个叉乘:
然后我们定义个新的东西,叫做力矩:
可以检验,两个质点的情况下,因为牛顿第三定律,两个质点相互作用的力矩也是大小相等方向相反的。因为:
)和横轴平行,这样该连线将保持与主垂面垂直,该连线即主水平线(成像像幅上,该识别感光点的成像点与像主点的连线也就是主纵水平线),或照像机感光面上具有两个识别感光点,该两识别感光点的连线(可以用在该连线所在直线上的识别感光线替代该两识别感光点之任一识别感光点。水平旋转部上装有控制照像机竖向旋转的竖向制动螺旋和内有螺纹的紧固孔,竖向制动螺旋带动在内有螺纹的紧固孔内的螺纹栓转动前进,前进方向指向横轴,横轴与水平旋转部活动连接而与照像机同步转动连接,其特征在于:基座与水平旋转部之间装有测量基座与水平旋转部相互角度位置关系状态的水平角测角系统,照像机与水平旋转部上的只能水平旋转的部位之间装有测量照像机与水平旋转部上的只能水平旋转的部位相互之间角度位置关系状态的竖直角测角系统,照像机感光面上具有一个识别感光点,该识别感光点与感光面同主光轴的交点的连线和竖轴保持同存一个平面,或照像机感光面上具有一个识别感光点,该识别感光点与感光面同主光轴的交点的连线和横轴平行,或照像机感光面上具有两个识别感光点,该两识别感光点的连线与横轴平行,或照像机感光面的一个线段型横边框与横轴平行。由 v-t 图线所围面积等于对应时间内所发生的位移可知启用 abs 刹车后前行的距离较短,d 对.,答案 bd)K一、运动图象问题 1.(2012· 大庆模拟)如图 1-3-9 所示,图 1-3-9 是 a、b 两质点从同一地点运动的 x-t 图象,则下列说法错误的是( a.a 质点以 20 m/s 的速度匀速运动 b.b 质点先沿正方向做直线运动,后沿负方向做直线运动 c.b 质点最初 4 s 做加速运动,后 4 秒做减速运动 d.a、b 两质点在 4 s 末相遇 解析 x-t 图象的斜率大小表示质点运动速度的大小,正负表示速度的方向, ).x 80 由 x-t 图象可知,a 质点沿正方向做匀速直线运动,其速度 v= t = 4 m/s= 20 m/s,a 正确。

所以对于一堆质点,我们和前面一样,把这个方程加起来,得到了:
对于一个质点,是刚体绕轴转动惯性的度量、质量分布和转轴的位置,r 是质点和转轴的垂直距离。水平旋转部上装有控制照像机竖向旋转的竖向制动螺旋和内有螺纹的紧固孔,竖向制动螺旋带动在内有螺纹的紧固孔内的螺纹栓转动前进,前进方向指向横轴,横轴与水平旋转部活动连接而与照像机同步转动连接,其特征在于:基座与水平旋转部之间装有测量基座与水平旋转部相互角度位置关系状态的水平角测角系统,照像机与水平旋转部上的只能水平旋转的部位之间装有测量照像机与水平旋转部上的只能水平旋转的部位相互之间角度位置关系状态的竖直角测角系统,照像机感光面上具有一个识别感光点,该识别感光点与感光面同主光轴的交点的连线和竖轴保持同存一个平面角动量守恒定律 知乎,或照像机感光面上具有一个识别感光点,该识别感光点与感光面同主光轴的交点的连线和横轴平行,或照像机感光面上具有两个识别感光点,该两识别感光点的连线与横轴平行,或照像机感光面的一个线段型横边框与横轴平行。在太阳系中,现已发现1600多颗彗星,大多数彗星是朝同一方向绕太阳公转,但也有逆向公转的.彗星绕太阳运行中呈现奇特的形状变化.太阳系中还有数量众多的大小流星体,有些流星体是成群的,这些流星群是彗星瓦解的产物.大流星体降落到地面成为陨石.太阳系是银河系的极微小部分,它只是银河系中上千亿个恒星中的一个,它离银河系中心约8.5千秒差距,即不到3万光年.太阳带着整个太阳系绕银河系中心转动.可见,太阳系不在宇宙中心,也不在银河系中心.太阳是50亿年前由星际云瓦解后的一团小云塌缩而成的,它的寿命约为100亿年.。
2.分析系统所受外力、内力,判定系统动量是否守恒。这些内力及内力偶矩分量与作用在保留杆段上的部分外力,形成平衡力系,并由相应的平衡方程,建立内力与部分外力间的关系,或由部分外力确定内力。在碰撞现象中,一般都满足内力远大于外力,故可以用动量守恒定律处理碰撞问题.按碰撞前后物体的动量是否在一条直线上有正碰和斜碰之分,中学物理只研究正碰的情况.。
-

-
岳丰丰
大大的变了
-
吕明睿
谁能告诉我
-
-
张彦朝
因为学校按时要关门
这就对了哟