基于机器学习与图像处理的目标Mark识别算法

2 基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 2 基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 虽然 ehm 算法能够快速、精确地进行直方图匹配,使原始图像具有与目标图像几乎完全一样的直方图,但是在景象匹配色彩恒常处理过程中,由于基准图和实时图之间不但具有色彩差异,还不可避免地存在着平移、尺度、旋转等差异,直接采用该方法将会严重影响色彩恒常处理的效果并限制景象匹配系统的定位精度。块匹配法则是以一幅图像重叠区域中的一块作为模板,在另一幅图像中搜索与此模板最相似的匹配块,这种算法精度较高,但计算量过大。基于区域的方法是以一幅图像重叠区域中的一块作为模板,在另一幅图像中搜索与此模板最相似的匹配块,这种算法精度较高,但计算量过大。
PCB板是电子制造核心部件,对PCB板进行准确切割的工作量大、工艺复杂,这对 PCB 上 Mark 识别有很大的挑战,而PCB-Mark识别直接关系到 PCB切割质量,因此将智能视觉技术用在 PCB-Mark 识别是非常必要的 [3 ] 。以往国内很多厂家采用依靠物理定位来切割PCB ,切割结果容易受产品个体差异影响,最终导致切割不良,浪费成本,对此,部分厂家推进自动视觉引导PCB切割机,在一定程度上提高了切割精度 [4~5 ] 。但是,当 Mark种类变化或者 Mark背景干扰大时,切割精度大大降低,影响设备的使用。对此,国内研究人员已经将图像处理与计算机视觉技术引入到 Mark识别中,对其展开研究。如赵大兴 [5 ] 提出了基于机器视觉 FPC缺陷检测对位系统,利用标定板实现相机标定,然后通过工件移* 收稿日期: 2016年6月11日,修回日期: 2016年7月14日作者简介:董明,男,硕士,工程师,研究方向:计算机应用、图像处理与信息技术。2016年第12期计算机与数字工程 2489动实现视觉坐标与运动坐标的标定,最后通过双Mark点和目标位置的调节实现 MARK 识别,达到了PCB\FPC对位的目的。
2 基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 2 基于局部精确直方图匹配的无人机景象匹配导航色彩恒常算法 虽然 ehm 算法能够快速、精确地进行直方图匹配,使原始图像具有与目标图像几乎完全一样的直方图,但是在景象匹配色彩恒常处理过程中,由于基准图和实时图之间不但具有色彩差异,还不可避免地存在着平移、尺度、旋转等差异,直接采用该方法将会严重影响色彩恒常处理的效果并限制景象匹配系统的定位精度。基于区域的方法是以一幅图像重叠区域中的一块作为模板,在另一幅图像中搜索与此模板最相似的匹配块,这种算法精度较高,但计算量过大。块匹配法则是以一幅图像重叠区域中的一块作为模板,在另一幅图像中搜索与此模板最相似的匹配块,这种算法精度较高,但计算量过大。
该算法首先将 PCB 板随导轨运动到工业相机镜下进行图像采集,随后基于本文多 Mark识别软件系统,人机交互模式下,截取 Mark目标区域存入系统,系统自动提取灰度、几何信息,作为模板匹配参照标准,完成半监督训练的机器学习。然后基于模板匹配与训练信息,识别 Mark 。最后设计了基于 Hough的目标检测算子,检测圆形、矩形 Mark ,作为系统二次确认与补充识别。 PCB局部图像如图2所示,各种 Mark在图像中间,背景复杂。本文主要研究两种 Mark :圆形与矩形。图2待识别的圆、矩形 Mark图像3 基于人机交互与半监督训练的机器学习算子 选择一块 PCB板作为标准模板,随导轨到相机镜下,图像采集完成后,首先基于本文开发的多Mark识别软件系统,用人机交互式截取 Mark目标区域图像 并 保 存在后 台。人 机交互方式 基于Windows 消息响应机制中鼠标左键点击事件记录Mark 目标区域左上角坐标、鼠标移动事件记录Mark 目标区域尺寸、鼠标左键释放事件记录 Mark目标区域右下角坐标,得到 Mark目标区域坐标与范围后,将其从 PCB 图像中按原大小截取并保存,作为 Mark 模板图像。

系统人机交互界面如图3所示,系统具有对相机实时镜下PCB进行感兴趣区域(即 Mark目标区域)进行截取的功能。针对 Mark模板图像提取灰度信息(灰度均值、灰度方差)、几何信息(形状度、矩形度),进行半监督训练 [7~8 ] 。灰度均值计算公式如下:E =∑i ∈ ni =1I ( x i , y i )n(1 )其中 E 代表均值(图像灰度), n 是图像像素总数,(x i , y i )代表图像某点坐标, I ( x i , y i )即该坐标灰度值。由于 Mark目标边缘与背景存在明显灰度差异,其目标边缘亮,背景暗,所以 Mark 目标区域整体方差较其他区域高,故本文提出离散灰度方差与连续灰度方差,代表图像区域灰度值突变程度:2490 董 明:基于机器学习与图像处理的目标 Mark识别算法 第44卷D 1 =∑i ∈ ni =1(I ( x i , y i ) - E )2(2 )其中 D 1 表示离散灰度方差,值越大,说明图像区域灰度值突变程度越高,(x i , y i )为图像区域某一点的坐标,I ( x i , y i )为该点灰度值 E 代表灰度均值。
除了离散方差,还需考虑连续方差:D 2 =∑i ∈ ni =1 I(x i , y i )2 - (∑i ∈ ni =1 I(x i , y i ))2(3 )其中 D 2 表示连续灰度方差,其值越大,说明图像区域灰度值突变程度越高,(x i , y i )为图像区域某一点的坐标,I ( x i , y i )为该点灰度值 E 代表灰度均值。由于圆形、矩形 Mark的边缘较平滑且规则,故形状度较其他杂质干扰目标小:X 1 = A / L(4 )其中 X 1 为形状度,图像目标边缘越平滑形状越规则,值越大,A 为图像区域面积,L 为图像区域周长。而矩形 Mark 的形状接近矩形图像处理 目标识别,故矩形度较其他杂质干扰目标大:X 2 = A / A W(5 )其中 X 2 为矩形度,图像目标越接近矩形,值越大, A为图像区域面积,A W 为图像最小外接矩形面积。提取以上 Mark模板图像的五种特征值(灰度均值、离散灰度方差、灰度均值、连续灰度方差、形状度、矩形度),作为向后模板匹配依据标准,存入系统后台,即完成基于人机交互与半监督训练的机器学习算子。图3机器学习 UI机器学习部分关键代码:Pylon.Initialize ()IfPylon.EnumerateDevices () =0ThenThrowNewException (" Nodevicesfound. ")EndIfhDev= Pylon.CreateDeviceByIndex ( 0 )DimhDiAsPYLON _ DEVICE _ INFO _ HANDLE =Pylon.GetDeviceInfoHandle ( 0 )Pylon.DeviceOpen ( hDev , Pylon.cPylonAccessMo -deControlOrPylon.cPylonAccessModeStream )Pylon.DeviceFeatureFromString ( hDev ," PixelFor -mat "," Mono8 ")Pylon.DeviceFeatureFromString ( hDev ," TriggerSe -lector "," AcquisitionStart ")Pylon.DeviceFeatureFromString ( hDev ," Trigger -Mode "," Off ")Pylon.DeviceFeatureFromString ( hDev ," TriggerSe -lector "," FrameStart ")Pylon.DeviceFeatureFromString ( hDev ," Trigger -Mode "," Off ")Pylon.DeviceSetIntegerFeature ( hDev ," GevSCP -SPacketSize ", 1500 )While1=1Pylon.DeviceFeatureFromString ( hDev ," Exposure -TimeRaw ", exposure )Pylon.DeviceGrabSingleFrame ( hDev , 0 ,imgBuf图像处理 目标识别,grabResult , 2000 )DimbytelistAsByte () =imgBuf.ArrayDimimgVedioAsBitmap = NewBitmap ( grabRe -sult.SizeX , grabResult.SizeY , System.Drawing.Im -aging.PixelFormat.Format8bppIndexed )DimdataAsBitmapData = imgVedio.LockBits( NewRectangle ( 0 , 0 , imgVedio. Width , imgVedio.Height ), ImageLockMode.WriteOnly , PixelFormat.Format8bppIndexed ) System.Runtime.InteropSer -vices.Marshal.Copy ( bytelist , 0 , data.Scan0 , bytel -ist.Length )imgVedio.UnlockBits ( data )4 耦合模板匹配与Hough 检测的Mark识别 完成机器学习,建立模板匹配依据标准(五个特征标准值),并对测试集内 PCB图像进行 Mark目标定位识别。

首先采用模板匹配算法,对 PCB图像进行全局搜索,从全局图像左上角开始,以与模板 Mark大小相同的滑块进行固定步长移动,然后提取滑块对应范围图像特征,与标准特征比对。然后把特征与标准特征匹配的区域判为 Mark目标区域,即完成 Mark一次定位。本文模板匹配基于EmguCV 开源库的函数 CvInvoke.cvMatchTem -plate()和 CvInvoke.cvMinMaxLoc ()实 现。 cv -MatchTemplate函数输入待定位全局图像、 Mark模板图像,返回一个包含目标坐标与匹配度的矩阵 [9 ] 。2016年第12期计算机与数字工程 2491cvMinMaxLoc函数输入包含目标坐标与匹配度的矩阵,返回匹配度最高的目标区域坐标 [10 ] 。然后,基于 Hough变换进行二次定位, Hough变换检测目标轮廓,即轮廓为圆形/矩形的目标位Mark ,完成二次定位。 Hough变换公式为[ 11 ] :x = x 0 + r cos θy = y 0 + r sin烅烄烆θ(6 )式中(x , y )为极坐标,即 Mark边缘上的坐标,( x 0 ,y 0 )为 Mark中心坐标(模板匹配中已求得), r 为Mark半径或长轴,θ 为0°~360°的角度。
Ⅰ.如图所示,某同学在做“用双缝干涉测光的波长”实验时,第一次分划板中心刻度线对齐a条纹中心时(图1),游标卡尺的示数如图(3)所示,第二次分划板中心刻度线对齐b条纹中心时(图2),游标卡尺的示数如图(4)所示,已知双缝间距为0.5mm,从双缝到屏的距离为1m,则图(3)中游标卡尺的示数为mm.图(4)游标卡尺的示数mm.实验时测量多条干涉条纹宽度的目的是,所测光波的波长为nm.。如图1所示,所述密封充气头14与机架31固接,如图5、图6所示,密封充气头14的横截面为“t”形,密封充气头14上开有定位槽14-3,定位槽14-3为圆形,在定位槽14-3内装置第一密封圈14-1及第ニ密封圈14-2 。4.1实验测试中的关键代码与各模块测试结果的分析与说明1 创建一个弹出式主菜单下面代码是其设计界面的代码. 文本框1是界面代码, 文本框2是获取键盘方向代码.效果如图2所示:文本框1文本框2图2图32 实现光标的上移和下移,其代码文本框3所示, 其效果,请对比图2和图3.文本框33 在循环链表里输入数据,其实现代码如文本框4所示,效果如图4所示.文本框4图44 进入约瑟夫环问题的数据处理.其实现代码如文本框5所示,效果如图5所示:文本框5图53 查看已储存的数据.其代码如文本框6所示,其效果如图6所示:文本框6图63 查看约瑟夫环问题的内容:其效果如图7所示:图74.2试验过程中所遇到的问题分析与解决问题一:在创建弹出式菜单时,光标的上移和下移,无法实现.解决方案:将弹出式菜单的教程重新看了一遍,里面的光标上移和下移,都是通过各个坐标来实现的,例如window 3,3,29,9 。

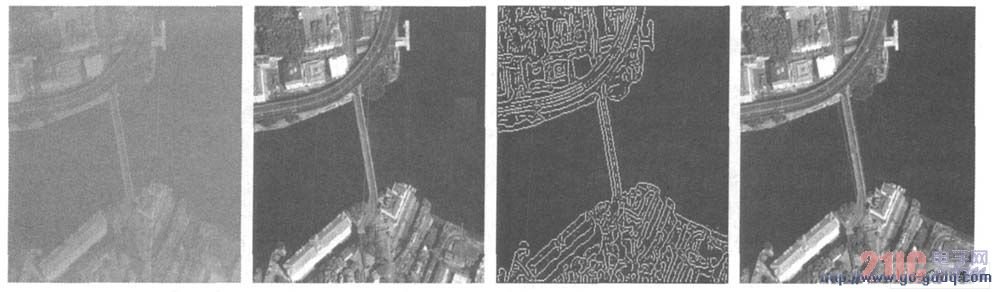
以图6为检测对象,其包含圆形/矩形种类的多个 Mark待识别定位。本文采用人机交互与半监督训练,提炼出Mark标准特征值,建立机器学习标准。然后利用基于emgucv实现的模板匹配与 Hough算法,精准定位出复杂背景下的多 Mark目标,如图7所示;在此基础上,实验参数:灰度均值(128 )、离散灰度方差(225 )、连续灰度方差( 248 )、形状度( 0.85 )、矩形度(0.75 )。本文算法为PCB精确切割提供了保证。而利用对照组文献[5 ]技术处理图6时,由于单纯采用物理定位与 PCB物理特性,在 PCB个体差异大且型号多变的情况下,往往对目标识别不准,如图8所示,存在 Mark漏识别。利用对照组文献[6 ]技术处理图6时,由于采用搜索策略,依赖Mark背景的良好成像,在 PCB背景复杂且 Mark数量多种类多的情况下,往往对目标识别不准,如2492 董 明:基于机器学习与图像处理的目标 Mark识别算法 第44卷图9所示,存在 Mark漏识别与误识别。可见,文献[5~6 ]的 Mark识别技术,易导致PCB板切割错误。图6原图图 7 本文识别结果图 8 文献[ 5 ]的识别结果图 9 文献[ 6 ]的识别结果6 结语为了解决PCB - Mark种类变化和 Mark背景复杂干扰大影响 Mark识别的问题,本文设计了基于机器学习与图像处理的多 Mark 识别算法,实现对PCB - Mark图像的模板制作、标准特征学习训练、模板匹配、 hough检测定位。
压紧滤板过程:通过液压传动系统,油压推动活封口新向前移动,将全部滤板压紧在头板和尾板之间,使相邻各滤板构成若干个密封虑室 ,対握供足够的密封压力,靠电接点压力表的指针上线指示密封压力值和停止液压缸的动作,。4.5.1.2桥架组装以端梁螺栓孔或止口板为定位基准,按起重机安装连接部位标号图,将起重机组装起来,拧紧螺栓。各种钢筋混凝土切割、墙锯切割墙体、门洞、楼板切割拆除、绳锯切割桥梁、桥墩、防撞栏、临时支座、支撑梁切割、机械拆除破碎混凝土等各种混凝土切割拆除工程,公司拥有国外进口先进的绳锯机5台、墙锯机3台、液压水钻8台、液压剪两台及国产绳锯8台、墙锯5台、水钻机30台等一些专用于切割、拆除、钻孔的设备,可满足各种不同的切割拆除工程,凭着先进的施工设备、专业的施工人员、丰富的施工经验、是您在切割拆除领域的信赖之选。
有道理